Download
1 / 25
250 likes | 356 Views
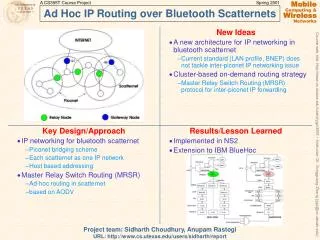
ASYNCHRONOUS FORMATION OF NON-HIERARCHICAL BLUETOOTH SCATTERNETS. Paal Engelstad ( http://www.unik.no/~paalee/research.htm ) Telenor R&D Tore Jønvik University of Oslo - Unik , and Do Van Thanh Telenor R&D. World Wireless Congress 3Gwireless’2003 May 27th-30th, 2003. San Francisco.

E N D
ASYNCHRONOUS FORMATION OF NON-HIERARCHICAL BLUETOOTH SCATTERNETS Paal Engelstad ( http://www.unik.no/~paalee/research.htm ) Telenor R&D Tore Jønvik University of Oslo - Unik , and Do Van Thanh Telenor R&D World Wireless Congress 3Gwireless’2003 May 27th-30th, 2003. San Francisco
Outline • Motivation • Bluetooth basics • Automatic Piconet formation (Sapifo) • Ethernet emulation (BNEP) • PAN profile and roles • IP alternatives discussion • IP Solution • Bluetooth Solution • Conclution
Characteristics of Bluetooth • Operate at 2.4 GHz band at a data rate of 720kb/s • Using Frequency Hopping Spread Spectrum dividing the frequency band 2,402-2,480 GHz into 79 channels available • Radio transceivers hop from one channel to another in a pseudo-random manner determined by the master • 625µs slot size, multi slot possible (3 and 5 slots)
Hop sequence generation: Bluetooth 48-bit Device address (IEEE 802 Std):
Piconet • Support up to 8 devices in a Piconet (1 master and 7 slaves) • Single master • Initiator becomes master • Controls communication • Set the clock and the hopping sequence • Slave(s) • Follows master
Procedure for communication between Bluetooth devices: • Detect devices within radio range • The Inquiry procedure • Connect to one of the detected devices • The Paging procedure • Set up L2CAP connection • Start SDP to get the device capabilities
Weakly connected underlying topologies: A realistic scatternet formation algorithm should not assume a strongly connected underlying topology where each node may connect to any other node in the scatternet. Instead, the algorithm should work even when there might be at least two nodes in the same scatternet that are out of each other’s radio range.
Asynchronous scatternet formation: An algorithm should not mandate that all nodes start forming the scatternet at the same time (e.g. in terms of an algorithm comprising several distinct phases). Such synchronous formations would probably be difficult to co-ordinate in real usage scenarios. Instead, Bluetooth devices should be able to enter or leave the scatternet one by one and at any time. In these events, topology changes should be handled locally and not propagated throughout the scatternet.
a. Minimal Piconet Overlap: Two piconets should be connected by at most one bridge node. b. Minimal Bridge Degree: A bridge node should participate in at most two piconets, i.e. each slave-slave bridge is slave of exactly two masters, while each master-slave bridge is slave of exactly one other master or master-slave. c. Piconet Size: The algorithm should limit (and possibly optimize) the size of piconets, i.e. the number of slaves assigned to one master. Bluetooth does not allow more than seven slaves per master.
TSF • Our approach attempts to form a scatternet topology which simplifies both scheduling and routing problems while minimizing the number of piconets which a relay node participates in (as opposed to the total number of piconets). We have developed an efficient topology formation algorithm, called TSF (for Tree Scatternet Formation), which assigns master/slave roles to nodes while connecting them in a tree structure. Our algorithm is both decentralized and self-healing, in that nodes can join and leave at any time without causing long disruptions in connectivity. It also decides dynamically and in a distributed fashion which nodes act as masters and which as slaves, thus avoiding manual configuration of roles to nodes or centralized decision making. Furthermore, our scheme does not require any communication between nodes already in the scatternet, using only Bluetooth's lower-layer primitives for detecting potential nodes to form links with and establish communication links.
TWO ALTERNATIVE NON-HIERARCHICAL ASYNCHRONOUS ALGORITHMS • Master-slave-based Scatternet Formation (MSF) • Slave-slave-based Scatternet Formation (SSF)
MSF • 1. Free nodes (F) should be able to connect to scatternet nodes (i.e. slaves, masters and/or master-slaves) as well as to each other. Hence, free nodes must alternate between INQUIRY and INQUIRY-SCAN. This is illustrated in Figure 3 by both an outgoing and an incoming arrow. • 2. Due to the Maximum Bridge Degree design principle, slave-slaves, if any, cannot connect to other nodes. Similarly, masters and master-slaves filled with seven slaved cannot connect to other nodes. Hence, the ss-, M'-, and ms'- nodes in Figure 3 has neither an outgoing nor an incoming arrow. • 3. In a scatternet without ss-bridges, slaves cannot obtain another slave-role of a connection. However, it may obtain a master-role (i.e. connect by INQUIRY), and become a master-slave. This is illustrated in Figure 3 by outgoing arrows pointing out from the slave (S). • 4. In a scatternet generating ms-bridges, masters should obtain another slave-role when connecting to other nodes (i.e. by connecting in INQUIRY-SCAN), and become a master-slave as a result of connection setup. Figure 3 illustrates this by incoming arrows pointing towards the master (M). • 5. Due to the Maximum Bridge Degree design principle, master-slaves cannot obtain another slave-role, but they may connect to other nodes as a master, i.e. as a result of an INQUIRY. Hence, the master-slave (ms) in Figure 3 has an outgoing arrow.
A simple MSF example Slave Sender Master Listener Free Node Sender/listener Slave Sender Slave Sender
SSF • The link formation scheme for SSF is derived by similar arguments as for MSF, except: 3. In a scatternet generating ss-bridges, slaves should obtain another slave-role when connecting to other nodes (i.e. by connecting in INQUIRY-SCAN), and hence become a slave-slave as a result of the formation of a new link. Figure 4 illustrates this by incoming arrows pointing towards the slave (S). 4. In a scatternet without ms-bridges, a master cannot obtain another slave-role as a result of formation of a link to another node. However, it may remain a master of the new connection (i.e. connect by INQUIRY). Figure 4 illustrates this by outgoing arrows pointing out from the Master (M). • 5. Due to the Minimal Bridge Degree design principle, a master-slave, if any, cannot obtain another slave-role, but it may connect to other nodes as a master, i.e. as a result of an INQUIRY. Hence, the master-slave (ms) in Figure 4 has an outgoing arrow. For completeness, we have shown master-slaves in Figure 4, although a scatternet formed only by SSF, will not contain any master-slave bridges.
A simple SSF example Slave Listener Master Sender Slave Listener Free Node Sender/listener Slave Listner
Evaluation • Sets of evaluation criteria • The effectiveness of a specific scatternet formation scheme comprises two parts. The first part is an assessment of how efficient the scatternet formation algorithm is in terms of overhead and delay (i.e. during the process of scatternet formation). Our proposed schemes do not require any reconfigurations or coordination throughout the scatternet. Instead, they are straightforward - and very efficient - unit-time schemes where overhead and delay are of little importance. • The second part relates to the efficiency of the operation of scatternets formed by the algorithm, (i.e. after and as a result of the topology created by the scatternet formation process). For the latter part, we have developed evaluation metrics to assess the topology formed by any scatternet formation algorithm. We present these evaluation criteria in the following sub-sections.
Number of disconnected scatternets (Connectivity-ratio) • rconn = N/N0 • Average Shortest Path (ASP-ratio) • rasp = ASP/ASP0 • Scatternet structure (Role-state ratios) • rsd= nsr/nm • rp= nm/n • rss= nss/nm • rms= nms/nm
Conclusion have argued that a scatternet formation algorithm should allow for asynchronous scatternet formation, and it should work well on weakly connected underlying topologies (i.e. when not all scatternet devices are within radio range of each other). Our simulations demonstrated that non-hierarchical algorithms form scatternet topologies that are considerably more efficient, in terms of connectivity and average shortest path, than those formed by comparable master-slave-based algorithms. Researchers have emphasized that slave-slave bridges are probably more optimal than using master slave-bridges, in terms of efficient bridge management. Our simulations also supported the advantages of slave-slave based scatternets. Indeed, the slave-slave based scatternet formation algorithm proved to have the highest ability to accommodate connectivity between nodes. A number of other proposed algorithms have implemented measures to avoid that piconets are filled with seven slaves. Our simulations indicate that such measures might not be necessary. The work presented in this paper should be extended to compare with the quite large number of proposed scatternet formation algorithms other than only TSF. Further work is also required to translate the ASP-metrics proposed in this paper into concrete communication performance on a Bluetooth scatternet.