Download
1 / 32
• 330 likes • 603 Views
Multiple Reference Station DGPS RTK For Sub-decimeter Level 3D Positioning. P. Alves and G. Lachapelle University of Calgary USM GPS Workshop Carrier Phase GPS Navigation for Hydrographic Surveys, and Seamless Vertical Datums March 16 – 18, 2004. Overview. Network RTK MultiRef™ approach

E N D
Multiple Reference Station DGPS RTK For Sub-decimeter Level 3D Positioning P. Alves and G. Lachapelle University of Calgary USM GPS Workshop Carrier Phase GPS Navigation for Hydrographic Surveys, and Seamless Vertical Datums March 16 – 18, 2004
Overview • Network RTK • MultiRef™ approach • Large-scale network (USCG NDGPS) initial results • Medium-scale test network on-going evaluation program • In-receiver approach to Network RTK • Concept • Results (Campania Network) • The Future of Network RTK • Modernized GPS and GALILEO USM GPS Workshop 2004
Why Use Network RTK? Position accuracy with WL ambiguities Fixed ambiguities are required for centimeter level 3D positioning. The type of ambiguity is important. Fixed ambiguities do not guarantee cm-level accuracy, especially in height. USM GPS Workshop 2004
Reduction of Measurement Errors • To achieve cm-level positioning both L1 and WL ambiguities (for ionosphere-free fixed ambiguities) are required. • L1 and WL ambiguity resolution is only reliable with 5 -10 km of the nearest reference station in single reference station mode. • Network RTK models the errors that limit the range of ambiguity resolution. USM GPS Workshop 2004
Desired Coverage Area Desired Coverage Area 100 100 Ref. Ref. Ref. Ref. Ref. 80 80 Ref. Ref. 60 60 Ref. Ref. Ref. Ref. Ref. 40 40 20 20 Ref. Ref. Ref. Ref. Ref. 0 Northing (km) 0 Northing (km) -20 -20 Ref. Ref. Ref. Ref. Ref. -40 -40 -60 -60 Ref. Ref. Ref. Ref. Ref. Ref. Ref. -80 -80 -100 -100 -100 -80 -60 -40 -20 0 20 40 60 80 100 -100 -80 -60 -40 -20 0 20 40 60 80 100 Easting (km) Easting (km) Multiple Reference Station RTK Independent ref. receivers Not Efficient - too many rx Network of reference receivers USM GPS Workshop 2004
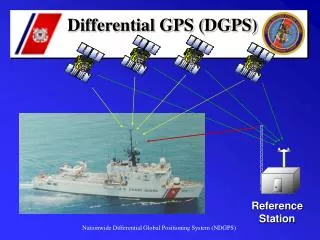
How It’s Done Land-line/Wireless RTCM GPS Receiver Control Center Reference Station Network User Output Corrections Input Observations Data from the reference station network is sent to the control center Control center calculates network corrections and applies them to the RS data User processes single RS (corrected) USM GPS Workshop 2004
U of C MultiRef™ Method Modeling of regional errors using reference stations interactively Three stage process: • Resolution of network ambiguities (Fixed or float). Used to measure error levels at the reference station locations • Interpolation of the errors to the location of the rover using least squares prediction • Application of the corrections to the rover and processing of rover data in real-time USM GPS Workshop 2004
MultiRef™ USCG NDGPS Testing • Two sub-networks selected • Two scenarios selected for each sub-network • East coast sub-network within the NOAA GPS-Met test network USM GPS Workshop 2004
North West Network USM GPS Workshop 2004
Observation Domain NW Network USM GPS Workshop 2004
Position Domain NW Network USM GPS Workshop 2004
North East Network USM GPS Workshop 2004
Observation Domain NE Network USM GPS Workshop 2004
Position Domain NE Network USM GPS Workshop 2004
NOAA GPS-Met Network • Troposphere grid model based on over 300 GPS stations • Test bed is located in North East USA • By 2010, GPS-Met atmospheric delay corrections will cover CONUS USM GPS Workshop 2004
#4: NE Network + NOAA Troposphere Model USM GPS Workshop 2004
Observation Domain (NE1 + Troposphere Model) USM GPS Workshop 2004
Position Domain (NE1 + Troposphere Model) USM GPS Workshop 2004
Position Domain (NE1 + Troposphere Model) USM GPS Workshop 2004
USCG NDGPS Test Summary • Network RTK significantly improves performance in both observation and position domains. • However, sub-decimeter level positioning is not possible on this large scale network. • A smaller, medium scale network, is better suited to achieving centimeter level 3D positioning. USM GPS Workshop 2004
U of C Southern Alberta Network (SAN) GPS Reference Stations GPS Reference Stations with MET instruments 14 NovAtel Modulated Precision Clock (MPC) Receivers. 10 Digiquartz MET3A Fan-Aspirated Meteorological Measurement Systems. km 30 60 90 120 USM GPS Workshop 2004
SAN Research Activities • Network RTK • Correction-based Network RTK methods • In-receiver Network RTK • Error modeling studies • Effects of network geometry and topology • Integration of Network RTK with other measurement instruments (i.e. inertial measurement units) • GPS Meteorology • Ground moisture correlation with GPS derived perceptible water vapor • GPS storm signatures • GPS occultation research • Regional tropospheric water vapor modeling USM GPS Workshop 2004
In-Receiver Network RTK Approach The roving receiver uses integrates the data from all available reference station to achieve network-based high accuracy 3D positions. GPS Receiver Land-line/Wireless User Reference Station Network USM GPS Workshop 2004
Advantages Correction-based Network RTK RS Control Center Network Processing Rover Positioning RS RS One-way communication In-Receiver Network RTK The rover data can assist with network processing RS Network Processing RS Rover Positioning RS Two-way communication USM GPS Workshop 2004
Campania Network 12 Station network (50 km average inter-receiver distance) Six scenarios tested using 24 hours of data at 1 Hz. USM GPS Workshop 2004
3D Position Accuracy USM GPS Workshop 2004
3D Position Accuracy Summary USM GPS Workshop 2004
Future of Network RTK:Modernized GPS and GALILEO • Approximately 60 satellites. • Three frequency observations per satellite. Past and current research projects: • Dilution of precision, availability and reliability with GPS, GALILEO, and combined GPS and GALILEO. • Ambiguity resolution and positioning accuracy with three frequency GPS, GALILEO and combined GPS and GALILEO. • GPS and GALILEO advanced integration methods (GPS and GALILEO crossed). • Triple frequency ionosphere modeling for long baseline ambiguity resolution and precise positioning. All of these research topics are necessary for GPS and GALILEO Network RTK. USM GPS Workshop 2004
Effects of Modernized GPS and GALILEO on Single RS RTK Simulated triple frequency data with 3 ppm differential errors Percentage of correctly resolved ambiguity sets Time to fix ambiguities correctly Plotted as a function of distance between the rover and reference station. USM GPS Workshop 2004
Effects of Modernized GPS and GALILEO on Network RTK • Faster network ambiguity resolution. • More precise measure of the errors at the reference stations. • Better modeling of the regional errors. • Reduction of measurement errors at the rover. USM GPS Workshop 2004
References • Fortes, L. (2002) Optimising the Use of GPS Multi-Reference Stations for Kinematic Positioning, Ph.D. Thesis, URL: http://www.geomatics.ucalgary.ca/links/GradTheses.html • Julien, O., M.E. Cannon, P. Alves, and G. Lachapelle (2004) Triple Frequency Ambiguity Resolution Using GPS/GALILEO, European Journal of Navigation, June • Liu, J., M.E. Cannon, P. Alves, M.G. Petovello, G. Lachapelle, G. Macgougan, and L. deGrout (2003) Performance Comparison of Single and Dual Frequency GPS Ambiguity Resolution Strategies, GPS Solutions, Vol. 7, No. 2, (July Issue), 87 – 100, Springer-Verlag • Pugliano, G. (2002) Tecnica GPS Multi-Reference Station Prencipie Applicazione Del Sistema MULTIREF™, Ph.D. Thesis, URL: http://www.geomatics.ucalgary.ca/links/GradTheses.html • Pugliano, G., P. Alves, M.E. Cannon, and G. Lachapelle (2003) Performance Analysis of a Post-Mission Multi-Reference RTK DGPS Positioning Approach. Proceedings of the International Association of Institutes of Navigation World Congress (October 2003, Berlin, Germany) USM GPS Workshop 2004
Additional Information Position, Location, and Navigation Projects: http://plan.geomatics.ucalgary.ca Network RTK at PLAN: http://plan.geomatics.ucalgary.ca/multiref_project.html Geomatics Engineering graduate theses: http://www.geomatics.ucalgary.ca/links/GradTheses.html USM GPS Workshop 2004