Download
1 / 24
250 likes | 600 Views
How to Draw a Straight Line Using a GP . Hod Lipson Computational Synthesis Lab Mechanical & Aerospace Engineering and Computing & Information Science, Cornell University. Benchmarking Evolutionary Design Against 19th Century Kinematic Synthesis . Kinematic Synthesis is a Challenge.

E N D
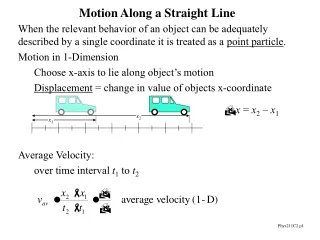
How to Draw a Straight Line Using a GP Hod Lipson Computational Synthesis Lab Mechanical & Aerospace Engineering and Computing & Information Science, Cornell University Benchmarking Evolutionary Design Against 19th Century Kinematic Synthesis
Kinematic Synthesis is a Challenge • Kinematics: Science of pure motion • Concerned with geometric displacement of connected rigid links without regard to forces or physical embodiment • Kinematic analysis: Predict motions of given mechanism • Well understood • Kinematic Synthesis: Assemble of a mechanism that achieves a prespecified motion • Poorly understood • Analytical methods: exist for some special cases (Chebychev) • Evolutionary Methods: Primarily in robotics • Only tree-structures (Sims 1994, Komosinski 2000, Hornby & Lipson, 2002) • Compound mechanisms (kinematic loops) (Lipson & Pollack, 2000)
Background: Long standing problem One of the first synthesis challenges to be posed: “[A rational approach to synthesis is needed] to obtain, by direct and certain methods, all the forms and arrangements that are applicable to the desired purpose. At present, questions of this kind can only be solved by that species of intuition that which long familiarity with the subject usually confers upon experienced persons, but which they are totally unable to communicate to others. When the mind of a mechanician is occupied with the contrivance of a machine, he must wait until, in the midst of his meditations, some happy combination presents itself to his mind which may answer his purpose.” Robert Willis, The Principles of Mechanism, 1841
Background: Degrees of Freedom • Degrees of freedom (DoF) • Number of independent parameters needed to describe the state of a mechanism • For 2D Structure, DoF = 2n-m-3 • n=nodes m=links 3=rigid body DoF removed by ground • Not applicable under singularities and degeneracies 1=curve 2=area N/A (overconstrained)
Mechanism Representation • A mechanism could be represented as a graph • Many graph encodings(Luke & Spector, 1996) • Cellular encoding (Gruau, 1994) • Parse trees • L-Systems • Suitable for computational networks, not mechanical networks • Highly connected graphs • Vanishingly small number of them have one DoF • Need a representation suitable mechanisms • Retains DoF across variation • Tree-based (hierarchical, for GP) • Evolvable (less coupled, effective crossover)
Top down encoding of a mechanism Start with Embryo with desired # of DoF, e.g. a four-bar mechanism (1 DoF) Two variation operators maintain DoF Example: A tree that constructs this 1-DoF compound mechanism E.g. Transform dyad into tryad Operators provably DoF invariant
Bottom-up encoding of a 1-DoF mechanism 1-DoF terminals Join substructures hierarchically at exactly two nodes (maintains DoF) Example: A tree that constructs this 1-DoF compound mechanism Operators provably DoF invariant
Intermediate Conclusions • Proposed two new DoF-invariant representations for kinematic mechanisms • top-down and bottom-up tree encodings But wait, there’s more…
A hard test problem • The straight line problem • Devise a mechanism that traces a straight line without a reference to an existing straight line • Human-competitive problem • Of great practical importance in the 18th and 19th century. • has baffled the world’s greatest kinematic inventors for a century, many solutions put forward. • Now forgotten • with advent of precision manufacturing
The Straight Line Problem It is easy to think of a mechanism that traces an exact circle without having a circle built in: A compass. ? Can you think of a linkage mechanism that will trace a straight line without reference to an existing straight line?
The Straight Line Problem It is easy to think of a mechanism that traces an exact circle without having a circle built in: A compass. One solution: The Peaucellier (1873) The straightness of the links themselves does not matter
The Straight-Line problem • Needed to guide the piston of the steam engine. • The breakthrough that made steam engines a success (b) “Though I am not over anxious after fame, yet I am more proud of the parallel motion than of any other mechanical invention I have ever made” James Watt, cf. 1810 [15] Watt’s first straight line mechanism (1784) James Watt’s original patents used racks and sectors, and many other cumbersome solutions
More established solutions Silverster-Kempe’s (1877) Peaucelier (1873) Chebyshev (1867) Robert (1841) Source: Kempe A. B., (1877), How To Draw A Straight Line, London See http://kmoddl.library.cornell.edu Chebyshev (1867) Chebyshev-Evans (1907)
Considered fundamental technology Cornell University acquired in 1882 about 40 straight-line mechanism models and used them in the early engineering curriculum. See videos at Cornell University Digital Library of Kinematic Models http://kmoddl.library.cornell.edu
Background: Kinematic simulation • Propagate motion using relaxation of elastic linkages • Linkages stiffened to approximate rigid motion • Good: Simple, accurate and robust, handles singularities well • Bad: No dynamics (no accelerations, masses); slow
Background: Comparing Mechanisms • Comparison of mechanisms can be difficult • Equivalent mechanisms may appear very different • Masked by excess and redundant topology • Two transformations allow moving in “neutral pathways” of mechanisms • Rigid diagonal swap • Redundant dyad removal/addition
Evolving Straight line mechanisms • Used GP with Top-down tree encoding and 2-bar or 4-bar embryo • Population size: 100 • Crossover 90% • Mutation 10% (Node positions, Operator types) • Selection: SUS • Fitness: Straightness • Aspect ratio of tight bounding box of node traces
Some results Linearity 1:4979
Some results Linearity 1:5300 Infringes on Robert’s Linkage (1841) Published: Kempe A. B., (1877), How To Draw A Straight Line, London
Some results Linearity 1:12819
Some results Linearity 1:28340 Many more solutions were produced
Conclusions • Open-ended Kinematics synthesis • Long standing problem • Many applications, e.g. Robotics • Synthesis for computational networks inadequate • Proposed two new representations for kinematic mechanisms • Top-down and bottom-up tree encodings • DoF-invariant operators • Neutral-pathway operators • Benchmarked against human-competitive problem • Extensive documentation for a century of attempts • Results infringe and outperform known solutions • Next Step • Improve search process, and • Apply to contemporary challenges (multi DoF robotics)