Download

1 / 10
100 likes | 250 Views
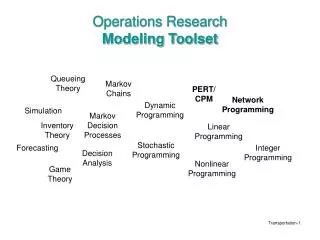
AVR Programming: Timers October 8, 2010. What is a timer?. A register that keeps track of a current value This value is updated at a certain frequency Allows applications to act in a precise and timely manner What time is it? Do something every X ms Wait X ms and then act

E N D
AVR Programming: Timers October 8, 2010
What is a timer? • A register that keeps track of a current value • This value is updated at a certain frequency • Allows applications to act in a precise and timely manner • What time is it? • Do something every X ms • Wait X ms and then act • Generate a waveform • ATmega128 • 2 8-bit timers and 2 16-bit timers • ATmega128RFA1 (scout) • 2 8-bit timers and 4 16-bit timers
What does this look like?An few things we’ll cover: • A control register • TCCR • Current time • TCNT • A clock signal • With prescalar • Output • Overflow (TOV) • Output compare (OC)
The current timer value • TCNTn is a register that holds the current value of the timer • n is the number of the timer you are accessing (0,2 are 8-bit and 1,3 are 16-bit) • You can read from and also write to this register to set your own time • For most applications you shouldn’t need to write this value because it is updated in hardware
Timer/Counter Control Register • FOCn – Force output compare • Only used in non-PWM modes • WGMnn – Waveform generation mode • We’ll save this for another Friday (Table 64 in the datasheet if you’re curious) • COMnn – Compare Output Mode • Another Friday as well (or Table 65 in the datasheet) • CSnn – Clock Select (next slide)
Clock Select and Prescalars We could simply clock the timer at the processor frequency 8 bits will overflow in 32 microseconds at 8MHz Great if we’re trying to sample a high frequency signal Terrible if we’re trying to count seconds Use CSnn to create a less frequent clock tick based on the values of CSn2,CSn1,CSn0 001 = no prescaler (clk/1), 010 = clk/8, 011 = clk/64, 100 = clk/256, 101 = clk/1024 Example: (clk/8) 6
How can we synchronize behaviors to the timer? Timer Overflow Interrupts • Enable in the Timer Interrupt Mask Register (TIMSK) by setting TOIEn (n is your timer #) • This works for 8-bit (read the datasheet for 16-bit) • TIMSK |= _BV(TOIEn); • Interrupt header is: ISR(TIMERn_OVF_vect){/*isr here*/;}
How does this look in code? #include <avr/interrupt.h> #include <avr/io.h> #include <avr/timer.h> int main(void){ volatile int x = 0; DDRB |= _BV(PC0) | _BV(PC1) | _BV(PC4) | _BV(PC5); TIMSK |= _BV(TOIE0); //enable timer overflow interrupt 7 TCCR0 |= _BV(CS00) | _BV(CS02); //select clk/1024, normal mode, no output compare sei(); //global interrupt enable while(1){;} } ISR(TIMER0_OVF_vect){ PORTC |= _BV(PC1) | _BV(PC5) | _BV(PC0) | _BV(PC4); //turn lights off if(x){ PORTC &= ~(_BV(PC1) | _BV(PC5)); //turn lights green x = 0; } else{ PORTC &= ~(_BV(PC0) | _BV(PC4)); //turn lights red x = 1; } }
Stuff to try out • Output your own clock frequency • Output your own signals on the bomleds or orbs • Poll one of the push buttons every x amount of time • Have the colony robots keep track of time of day • Make a dance that ACTUALLY syncs with music (down to the microsecond)
Help/More Info Datasheet: http://www.atmel.com/dyn/resources/prod_documents/doc2467.pdf