Download
1 / 26
260 likes | 422 Views
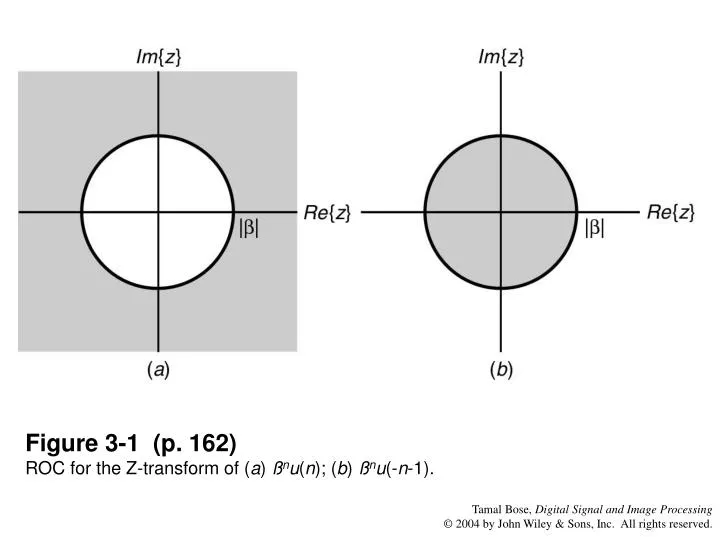
Figure 3-1 (p. 162) ROC for the Z-transform of ( a ) ß n u ( n ); ( b ) ß n u (- n -1). Figure 3-2 (p. 164) ROC for the Z-transform of the sequence 2 n u ( n ) + (-3) n u (- n -1). Figure 3-3 (p. 168). Figure 3-4 (p. 179) The stability triangle.

E N D
Figure 3-1 (p. 162)ROC for the Z-transform of (a) ßnu(n); (b) ßnu(-n-1).
Figure 3-2 (p. 164)ROC for the Z-transform of the sequence 2nu(n) + (-3)nu(-n-1).
Figure 3-7 (p. 184)Examples of FIR filter impulse responses; (a) FIR-I; (b) FIR-II; (c) FIR-III; (d) FIR IV.
Figure 3-8 (p. 187)Responses of FIR-I filter in Example 3.13.
Figure 3-9 (p. 188)Responses of FIR-II filter in Example 3.13
Figure 3-10 (p. 189)Responses of FIR-III filter in Example 3.13.
Figure 3-11 (p. 190)Responses of FIR-IV filter in Example 3.13.
Figure 3-12 (p. 190)Possible zero positions for a linear phase FIR filter. The alphabets refer to the zeros that appear together.
Figure 3-15 (p. 198)Illustration of the overlap-save method.
Figure 3-17 (p. 201)Second-order Goertzel filter to compute X(k).
Figure 3-23 (p. 207)ROC of the Z-transform of an1bn2u(-n1, -n2).
Figure 3-24 (p. 213)Efficient computation of condition I.2 in Huang’s theorem.