Download
1 / 37
390 likes | 811 Views
Mitul Shah 11715595. Spine Assist. Medical Robotics ECE S 690 / 490. Outline. The intended application of this system Architecture and Components Working Mechanism The Company and Competition An Engineering Perspective References. Mitul Shah 11715595.

E N D
Mitul Shah 11715595 Spine Assist Medical Robotics ECE S 690 / 490
Outline • The intended application of this system • Architecture and Components • Working Mechanism • The Company and Competition • An Engineering Perspective • References Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
The Intended Application of the System Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
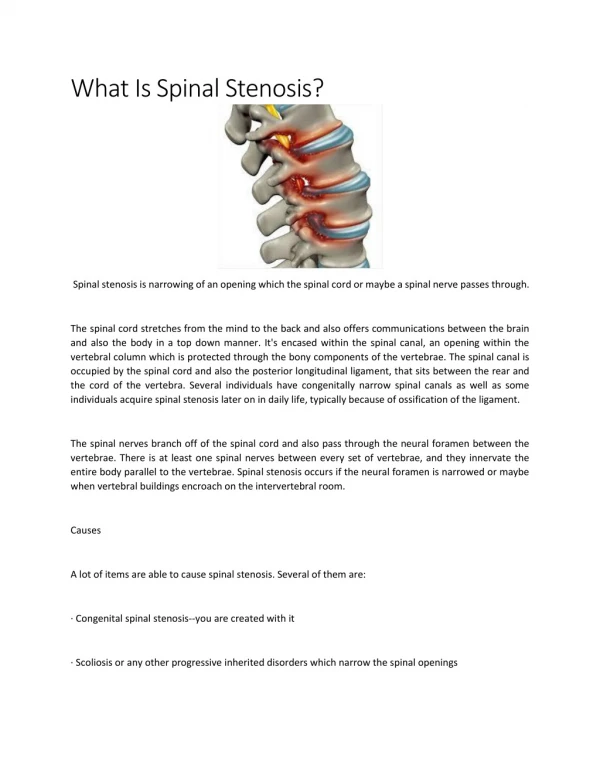
The Older Approach • Spinal fusion, also known as spondylodesis or spondylosyndesis, is a surgical technique used to combine two or more vertebrae using a screw like implant. • With the help of multiple fluoroscopy images the surgeon continuously monitors the placement of the pedicle in the spinous process. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
200 years ago: CUT and then SEE 1850 1965 1995 2004 Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
The Older Approach Drawbacks • Intricate, delicate and long surgery • 10% risk of implant misplacement, out of which 5% have clinical consequences. • 30% of implants could have been better placed, though they do not require revision surgery • Radiation Exposure Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
What SpineAssist Brings to the Table • Enabling precise and efficient Minimal Invasive access procedures. • Short MIS procedure time while Significantly reduce exposure to Fluro radiation (2 shots only). • Operated with no dedicated personal in the room. • No need to maintain Line of Sight during operation • Training: • 2 hours saw bone. • 5 cases supported by clinical instructor. • Set up: Nurse / Radiology technician based 3 minutes set up time Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Some important Statistics • 2008, the total U.S. spinal implant market was valued at $4.75 billion(1), coupled with a dynamic market growth of 10.7% annually, and is projected to reach more than $3.8 billion in the year 2009. • Aimed to increase the accuracy of implantation during surgeries • Minimally invasive spinal fusion systems are estimated to grow at a compound annual rate of nearly 15%, from an estimated $107 million in 2004 to more than $200 million in 2009. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Architecture and Components Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
The Workstation Miniature Robot Device The T- Frame Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Workstation And Software • Software allows surgeons to perform pre-operative planning on a PC at their own convenience. • A virtual catalogue of surgical implants allows visualizing the placement of the implants in 3 planes for each vertebra. • The software allows for a step by step review of the planning and simulation of correction intended by the procedure. • The software supports a range of measurements including Cobb angle, lordosis and kyphosis. The software also calculates rod length and curvature. • The workstation connects to a fluoroscopic C-Arm and performs automatic CT-to-fluoroscopy image registration based upon 2 fluoroscopic images. The workstation is used to control the precise motion of the miniature device to the preplanned position Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Miniature device • A miniature, high precision hexapod with 6 DOF is used as guidance assistance for spinal surgery. • The hexapod robot measures 50 mm (2 in) in diameter and 80 mm (3.15in) in height for a weight of 250 g (0.5 lb). • The working volume is several cubic centimeters depending on the guide arm used. • Six of Faulhaber’s DC brushless smoovy® gear motors with custom drive electronics drive the linear actuators based on a high precision, miniature lead screw design. • Accurate and absolute displacement measurement is assured by seven LVDT sensors, one for each actuator and the seventh tracking the performance of the others. The miniature drive measuring only 5 mm in diameter and has a custom M2.5 thread lead screw. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Platform • Hover-T™ for minimally invasive, percutaneous procedures or 3+ level cases • Clamp and Bridge for open procedures and scoliosis/deformity cases • Bed Mount for VCF, biopsy and single level approaches • Bilateral Bed Mount Hover T for Cervical and GO-LIF cases. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Working Mechanism Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
The Procedure • The video can be found here Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
MazorSurgicalTechnologies Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
The Company • Established in 2001and sponsored by the Technion (Israel Institute of Technology). • Pioneered the development of miniature Semi robotic bone mounted positioning systems • Mazor is a leading provider of SpineAssist, a highly accurate, minimally invasive, easy-to-use, miniature surgical assistance system for a wide range of spine procedures • Strong IP position with 8 patents submitted (main patent has been accepted). • The company’s offices are located in Caesarea, Israel and Atlanta, USA (Mazor Surgical Technologies Inc.) and employs 32 individuals. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Current Status • The product and its MIS platform, the “Hover-T” has been approved by the FDA and CE for marketing and use within the US and Europe. • The system is used clinically in US, German, Israeli and Korean hospitals. • Over 150 cases have been preformed with the SpineAssist since mid 05. • The SpineAssist device supports the wide range of surgical procedures Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
The Cost • First financial round (USD8.5M ) took place as of Q1/2003. Investors includes: Johnson & Johnson DC (USA), Shalom EF (USA), DOR Ventures (Belgium), MBVC (Italy). • Second financial round (USD12M) been closed as of May 2005. Investors includes existing share holders together with IHCV. • Manual Spinal Fusion Surgery can cost an average of $ 62,000 solely for the operation. • The spine assist robot cost $ 100,000 per installation and an additional $ 900 per operation towards disposable patient specific clamps. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
The Market Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Helios – Germany HSS – New York Israel: Tel hashomer Hadassah Cleveland Clinic – Cleveland LA: UCLA CCDH Naval Medical Center – Virginia USMD – Dallas Korea – all hospitals Over 150 cases have beenpreformed with the SpineAssist between Jan – Jun 06 Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Total Available Market Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
The Competition • Stealth Station: Manufactured by Medtronic SofamorDanek Inc. • Many more navigational platforms being developed namely • BrainLAB, which sells the VectorVision platform for orthopedic surgical navigation • CBYON, a Mountain View, Calif.-based firm that also sells visualization tools for use in spine surgery. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Regulations • Has been issued a 510 K regulatory approval on 23rd August 2007. • 510(k) Number K063607 • FDA has classified Stereotactic devices as a Class II medical device, with product code HAW and 21 CFR classification code 882.4560. Review by the General & Plastic Surgery Devices Panel. • 9 performance tests were performed on the system • Software Validation (IEC 60601-1-4 & FDA Guidelines) • Biocompatibility Testing (ISO 10993) • OsteoidOsteoma Case Study • Thoracic Hover-T Case Study • General Spinal Accuracy Test • New Imaging and Lateral to 30 degree Accuracy Test • Use of Prisms in Tranislaminar Facet Cases Study • Hover-T Accuracy Test Results Report • Hover-T Stability Test Results Report • Vertebroplasty Summary Report Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Spine (Multi Level) Fixation with Pedicle Screws Misplaced Pedicle screw Revision Application The Task Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Clamping Techniques Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Single Level Clamping Multi – Level Bridges Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Rigidly Mounted to the Bony Anatomy Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Hover-T MIS Bridge (with lateral capabilities) Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
An Engineering Perspective Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Advantages • The high precision software guiding system and an accurate computer to calculate the rotation and displacement transformations , the overall system accuracy and repeatability is less than 100 microns and 10 microns respectively. • With highly accurate and durable Faulhaber’s DC brushless smoovy® gear motors supported with custom drive electronics drive the 6 linear actuators and a miniature lead screw design the motion control accuracy is of 10 microns. • The displacement of the linear actuators is constantly measured in a feedback mechanism by 7 Lvdt’s. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Advantages • When you take into account human influence and the CT- and fluoroscopic-image distortion, the system accuracy in placing an implant with respect to the preoperative plan is of less than 1.5 mm. • The computerized simulations and pre-operative procedures supported by the automatic image registration has reduced the number of fluroscopy images required per operation by a factor of 3 hence less radiation exposure time . • Less pain, smaller incisions, fewer complications and a more rapid return to normal activity • The surgeon drills and places the desired implant with 2.5 times more accuracy than with freehand, and with 51 times less radiation exposure. (2) Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Disadvantages • One has to attach a bridge to the tool for advanced entry into the spinous process as shown in the video. • The T- frame limits the range of motion for the robotic device. One cannot have multiple insertions if they are at a distance greater than the length of the T-frame. • Doctors require many hours of training before they can use the SpineAssist since they need to understand the software and pre-operative procedures in great detail before operating with the system Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Critical Review • Limited range of motion is by far the only major drawback for this system. • Consider the given system. • The optimal robot position is the calculated that aligns the robot and image coordinate frames Timagerobot is computed by matching three points, Piroboti =1,2,3, along the X,Y,Z axes at unit distance from the robot origin Pbaserobot with Horn’s closed-form solution. • Then, the planned trajectory computed in robot coordinates, and the closest point to the robot guide is obtained with t Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Critical Review 2 rotational joints • The L shaped tool arm attached to the soda can type miniature robot (hexapod) does not offer any degree of freedom to the operator. • Computational and development cost may have propelled this decision but .. • One could suggest the inclusion of 2 rotational joints as circled in the picture alongside • This would definitely complicate the computation of the transformation but would lead to much a more flexible robot Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
Critical Review • Another significant drawback of the SpineAssist is the T – frame. • With the T – frame one has to make 3 incisions to just place the foundation and then make actual operating incision • If we could develop a guide wire type of system, where the miniature robot would hover over the patient’s body. The system would be truly minimally invasive. Mitul Shah 11715595 Medical Robotics ECE S 690 / 490
References • Spine Assist Website • Research and Markets • SpineAssist: Miniature Robotic Guidance for Spinal Surgery Cadaveric Efficacy Study for Time, Accuracy and Radiation Exposure. Jan 2007. • Image-guided system with miniature robot for precise positioning and targeting in keyhole neurosurgery: L. JOSKOWICZ, R. SHAMIR, et al. • Hospital Buyer • Micro Motors Information • Venture Wire • FDA approval website • Medical Tourism Mitul Shah 11715595 Medical Robotics ECE S 690 / 490