Download
1 / 15
200 likes | 1.22k Views
EE 313 Linear Systems and Signals Fall 2010. Continuous-Time Convolution. Prof. Brian L. Evans Dept. of Electrical and Computer Engineering The University of Texas at Austin. Initial conversion of content to PowerPoint by Dr. Wade C. Schwartzkopf. Convolution Integral.

E N D
EE 313 Linear Systems and Signals Fall 2010 Continuous-Time Convolution Prof. Brian L. Evans Dept. of Electrical and Computer Engineering The University of Texas at Austin Initial conversion of content to PowerPointby Dr. Wade C. Schwartzkopf
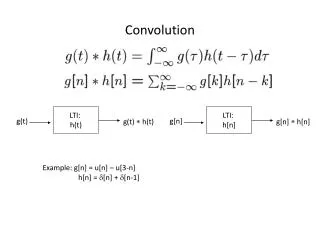
Convolution Integral • Commonly used in engineering, science, math • Convolution properties • Commutative: f1(t) * f2(t) = f2(t) * f1(t) • Distributive: f1(t) * [f2(t) + f3(t)] = f1(t) * f2(t) + f1(t) * f3(t) • Associative: f1(t) * [f2(t) * f3(t)] = [f1(t) * f2(t)] * f3(t) • Shift: If f1(t) * f2(t) = c(t), thenf1(t) * f2(t - T) = f1(t - T) * f2(t) = c(t - T). • Convolution with impulse, f(t) * d(t) = f(t) • Convolution with shifted impulse, f(t) * d(t-T) = f(t-T) important later in modulation
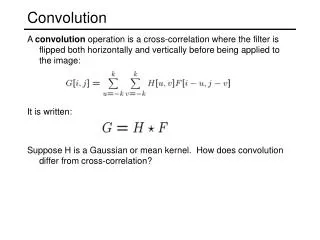
Graphical Convolution Methods • From the convolution integral, convolution is equivalent to • Rotating one of the functions about the y axis • Shifting it by t • Multiplying this flipped, shifted function with the other function • Calculating the area under this product • Assigning this value to f1(t) * f2(t) at t
f(t) g(t) 3 2 * t t 2 -2 2 3 g(t-t) 2 f(t) t 2 -2 + t 2 + t Graphical Convolution Example • Convolve the following two functions: • Replace t with t in f(t) and g(t) • Choose to flip and slide g(t) since it is simpler and symmetric • Functions overlap like this:
3 g(t-t) 2 f(t) t 2 -2 + t 2 + t 3 g(t-t) 2 f(t) t 2 -2 + t 2 + t Graphical Convolution Example • Convolution can be divided into 5 parts • t < -2 • Two functions do not overlap • Area under the product of thefunctions is zero • -2 t < 0 • Part of g(t) overlaps part of f(t) • Area under the product of thefunctions is
3 g(t-t) 2 f(t) t 2 -2 + t 2 + t 3 g(t-t) 2 f(t) t 2 -2 + t 2 + t Graphical Convolution Example • 0 t < 2 • Here, g(t) completely overlaps f(t) • Area under the product is just • 2 t < 4 • Part of g(t) and f(t) overlap • Calculated similarly to -2 t < 0 • t 4 • g(t) and f(t) do not overlap • Area under their product is zero
Graphical Convolution Example • Result of convolution (5 intervals of interest): No Overlap Partial Overlap Complete Overlap Partial Overlap No Overlap y(t) 6 t -2 0 2 4
Convolution Demos • Johns Hopkins University Demonstrations http://www.jhu.edu/~signals Convolution applet to animate convolution of simple signals and hand-sketched signals Convolve two rectangular pulses of same width gives a triangle (see handout E) • Some conclusions from the animations Convolution of two causal signals gives a causal result Non-zero duration (called extent) of convolution is the sum of extents of the two signals being convolved
A input output CommunicationChannel Tp t t x(t) y(t) ‘1’ bit 1 ‘0’ bit Tp Th t -A Transmit One Bit • Transmission over communication channel (e.g. telephone line) is analog receive ‘0’ bit Th Th+Tp t t -A Th receive‘1’ bit Model channel as LTI system with impulse responseh(t) A Th t Th Th+Tp Assume that Th < Tp
1 Th t Transmit Two Bits (Interference) • Transmitting two bits (pulses) back-to-back will cause overlap (interference) at the receiver • How do we prevent intersymbolinterference at the receiver? * = A Th+Tp 2Tp t Tp Tp t -A Th Assume that Th < Tp ‘0’ bit ‘1’ bit ‘0’ bit ‘1’ bit intersymbol interference
Th+Tp t Tp -A Th ‘0’ bit ‘1’ bit Transmit Two Bits (No Interference) • Prevent intersymbol interference by waiting Th seconds between pulses (called a guard period) • Disadvantages? * = 1 A Th+Tp Th Th Tp t t Assume that Th < Tp ‘0’ bit ‘1’ bit
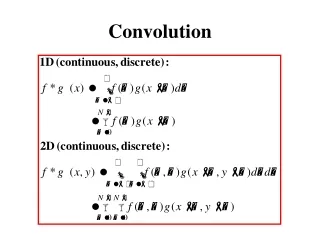
Discrete-time convolution For every value of n, we compute a new summation Continuous-time convolution For every value of t, we compute a new integral x[n] h[n] y[n] x(t) h(t) y(t) LTI systemrepresentedby its impulseresponse LTI system representedby its impulseresponse Discrete-time Convolution Preview
Discrete-time Convolution Preview • Assuming that h[n] has finiteduration from n = 0, …, N-1 • Block diagram of an implementation (finite impulse response digital filter): see slide 2-4 flip and slide x[n] z-1 z-1 … z-1 … h[0] h[1] h[2] h[N-1] S y[n]
Pillars of electrical engineering (related) Fourier analysis Probability andrandom processes Pillars of computer engineering (related) System state Complexity Finite-state machines for digital input/output Finite number of states Models all possible input-output combinations Can two outputs be true at the same time? Given output observation, work backwards to inputs to see if output is possible This is called observability Philosophy EE 313, 438 EE 351K EE 306, 312, 316, 422C EE 360C EE 313 is pre-requisite for EE 351K
Test Engineer BS degree Test other people’s designs Starting salary: $65,000 Design Engineer MS degree, or BS degree plus 2 years experience and design short courses Design new products Starting salary: $75,000 What about the Ph.D.? ¾ of Ph.D.’s to industry ¼ of Ph.D.’s to academia CTO VP, Eng. Technical Staff (R&D) PhDEE2 Director Eng. Proj. Management PhDEE1 MSEE Design Eng. Test Eng. BSEE BSEE Tech. Technician Corporate Technical Ladder • Ph.D. based on system prototyping • Ph.D. with significant theoretical results