Download
1 / 32
320 likes | 347 Views
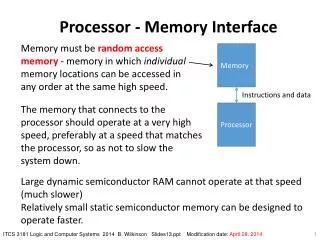
Join us for a comprehensive review of the current processor features, upcoming modifications, sub-processor discussions, platform/compiler considerations, GISMO library developments, and products overview.

E N D
GISMO Processor Review June 28, 2007
Agenda • 9:00 Welcome (Marty) • 9:10 Current processor overview (Wu) • 9:45 Processor modifications (all) • 10:15 Break • 10:30 Sub-processor discussions • Data stream merger • SAR processor • InSAR/post-InSAR processor • Topography estimator • Geocoding • 12:00 Lunch • 12:30 Sub-processor discussions • 1:00 Platform/compiler/regular code merging discussions • 1:30 GISMO library / utilities • 2:00 GISMO products • Intermediate products • Base DEM mosaic • Base intensity/coherence mosaic • 2:30 Data processing operation • 2:45 Documentation and dode release restriction • 3:00 End
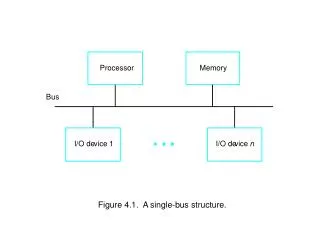
Current Processor Overview range compression Raw data GPS data Motion data Ingest data & synchronization Range compression Range compressed data (channel, waveform) azimuth compression SLC image archive Azimuth compression with back-projection & two layer refraction Combine waveforms InSAR/post-InSAR processing base intensity & topography archives in azimuth/ground range geometry Post-InSAR processing: Left/right separation Interferogram flattening Interferogram filtering Phase unwrapping Registration & Create interferograms Base topography & base intensity estimation
Range compression block • Data ingest • GPS data (GPS time) $GPGGA,140416.00,7711.47644,N,06056.37227,W,1,07,01.1,+02932,M,,M,,*6D,1148392727,783059,0,1603080276 $GPGGA,140416.50,7711.47482,N,06056.27646,W,1,07,01.1,+02932,M,,M,,*62,1148392728,292034,0,1603080276 $GPGGA,140417.00,7711.47308,N,06056.18070,W,1,07,01.1,+02932,M,,M,,*6C,1148392728,791887,0,1613080275 $GPGGA,140417.50,7711.47122,N,06056.08497,W,1,07,01.1,+02932,M,,M,,*6F,1148392729,281803,0,1613080275 • Motion data (UTC time) 47640.0050 76.53075696 291.27465651 82.1540 0.955811 0.823975 88.2202 47640.0100 76.53075696 291.27465667 82.1541 0.950317 0.823975 88.2202 47640.0150 76.53075697 291.27465682 82.1541 0.950317 0.823975 88.2202 47640.0200 76.53075697 291.27465698 82.1541 0.950317 0.823975 88.2202
Range compression block • Raw Data Includes 3 header blocks: DataFileType, DataHeaderBlock and WaveformHeaderBlock • DataFileType • Char data_file_type[32] • Unsigned short year • Unsigned char subyear_version • Char reserved[5]
Range compression block • DataHeaderBlock • int data_type • double samp_freq • int prf_count • int num_ave • int rxAtten[64] • int rxBlank[32] • char cal_mode_en • char num_waveforms • char pad[2] • int cal_num_of_points • double cal_start_freq • double cal_stop_freq • double cal_delay • double cal_duration
Range compression block • WaveformHeaderBlock • double start_freq • double stop_freq • double pulse_duration • double cal_freq • double cal_delay • double cal_duration • char band_select • char zero_pi_mode • char tx_mult • char tx_mode • char tx_amp_en • char pad[2] • int mod0_count • int mod1_count • int num_sam[4] • int sample_delay_count[4] • char record_en[8] • int record_start[8] • int record_stop[8] • int blank_delay0_count • int blank_delay1_count
Data Synchronization • Synchronization between raw data and motion data Radar time GPS time Raw data GPS data Motion data If in NMEA GPS data, the UTC time is 140416.00, which is 14 * 3600 + 4 * 60 + 16 = 50656 seconds of the day. This time should correspond to 50656 + 14 = 50670 seconds in the motion GPS data.
Synchronization between motion (GPS) data and Radar raw data
Right-side Left-side x pointing forward R5 R2 R4 R1 y R3 R0 T1 T0 (7.38, 0.50) (-7.38, 0.45) (-3.91, 0.61) (3.91, 0.65) (6.43, 0.53) (-6.43, 0.50) z Antenna Geometry (-8.33, 0.40) (8.33, 0.46) • Receiving antennas R0, R1 and R2 are at the left side, and R3, R4 and R5 are at the right side of the aircraft • Transmitting antennas T0 and T1 working alternatively
66.7 s T0 transmits W0 3 s pulse width 39.68 s Receiving W0 3.5 s 66.7 s T0 transmits W1 14 s Receiving W1 39.68 s 66.7 s T1 transmits W2 3.5 s 39.68 s Receiving W2 66.7 s T1 transmits W3 14 s T1 transmits W3 39.68 s Waveforms • 4 waveforms are transmitted and received
Do range compression • Use ideal chirp for range reference function • Real time range compressor Ingest_gismo_raw_data raw_data_filename waveform_index channel_index start_record number_of_records output_base_filename RC_using_gps RC_using_qlgps • Post range compressor create_RC_data (using motion data) • Need option to use measured reference function
Azimuth compression Z (5840 m) • Imaging plane • Back-projection algorithm aircraft X (5840m) x y z
free air with refraction index n1 = 1.0 r1 H 1 r 2 D Ice mass with refraction index n2 = 1.8 r r2 Consider two-layer Refraction • Effective range: r = r1 + r2 * n2
Interferometric Processing • Registration • Create interferogram • one-pair interferogram • Interferogram from channel combinations • Filter interferogram • Moving window average • Goldstein filter • Phase unwrapping • Wu (Vexcel) • SNAPHU (JPL)
Post-Interferometric Processing • Left/Right separation • Flatten interferogram (base inteferogram flattening needs detailed equations) • Base topography and intensity estimation
R5 R2 R1 R4 R0 R3 y T1 T0 rR2 rR5 rR4 z rR1 rR3 rR0 rT0 rT1 Systematic time delay deduced range error between transmitter elements T0 and T1: rT(Ri)= /2•(Ri,T0,T1), i = 0,1,…, 5 , P pulses Range errors between receiving elements R0 and Ri: riR= /2•(Ri, R0,Tk), i = 1, …, 5, k = 0, 1, Tomography • Antenna element time delay calibration
List of executables • ingest_gismo_raw_data • RC_using_gps • RC_using_qlgps • create_RC_data • combine_2waveforms • do_azimuth_compression • register • test_interf • calibrate_GISMO • direct_3d_cbp • GISMO_multi_channel • left_right_separation • create_base_topo
List of GISMO library • gpsDataReader • rawDataReader • RangeCompressedData • SearchRepeatPath • Direct3dBP • AzimuthCompression
List of Vexcel library used • Point • Fcomplex • FFT • DataPatch • PlainImage • ORTHO • Earthmodel • Makefile
Processor Modifications • Discussed on June 5 in OSU
InSAR Processor Co-registration N-look interferograms Coherence InSAR post processor L/R Filter Clutter Rejection Topo Estimator Phase Unwrap Products Phase Islands Geocode Smoothing Mosaic Topography Coarse radar data Preprocessor (wing flutter update) Motion Data GPS/INS Wing accelerometer Radar Calibration Data Data stream merge Sync’d fine radar data Element position history and Time tag Ice Density Profile Data Multilook Image formation SLC Files SAR Processor Digital elevation Model Read data Ray Bending Range Compresssion Backscatter mosaic Coherence Mosaic Surface Topo Back Projection Bottom Topo Estimate
GISMO Processor • All source code and libraries in C++ • All source code distributed to all team members • Data stream yet to be optimized • Tentantive assignments • Preprocessor and Merger – W. Blake, Rodriguez • SAR/InSAR processor – Wu • Ray Bending – Rodriguez • InSAR Post Processor – Wu • Topo estimator – TBD (Wu, Rodriguez, Jezek?) • Products – Wu, Jezek
Proposed GISMO Processor • Preprocessor • Ingest data, synchronization, data merge (including calibration data merge) • Range compressor • Single channel single waveform • All channel and waveform combinations • Azimuth compressor • Refraction, autofocus motion compensation • Pre/post-InSAR processor • Left/right separation • Surface/base separation • Interferogram flattening • InSAR processor • Filtering and unwrapping • Topography estimator • Geocoder • Earth model, projections • Utilities • Viewing tools
Base Topography estimation • 3.91 m baseline results
Base Topography estimation • 3.91 m baseline results
Equations for base interferometric phase • What is the best approximation for the slant range
Equations for left right separation • Cross noise terms • Conditions where the right and left side can not be separated • Layover • Shadow • others
Process all data of May 2006 for left/right separation (Topo) • Laser noise removal algorithm
Implications on the September flight design • Higher sensor altitude • Mapping (multiple flight to cover bigger swath)
Forward/backward looking SAR • Potential application of left/right separation