Download
1 / 22
861 likes | 2.73k Views
Euler Angles. This means, that we can represent an orientation with 3 numbers Assuming we limit ourselves to 3 rotations without successive rotations about the same axis:. Example. Gimbal Lock. Gimbal Lock Animation. Euler Summary. Video. Quaternions.

E N D
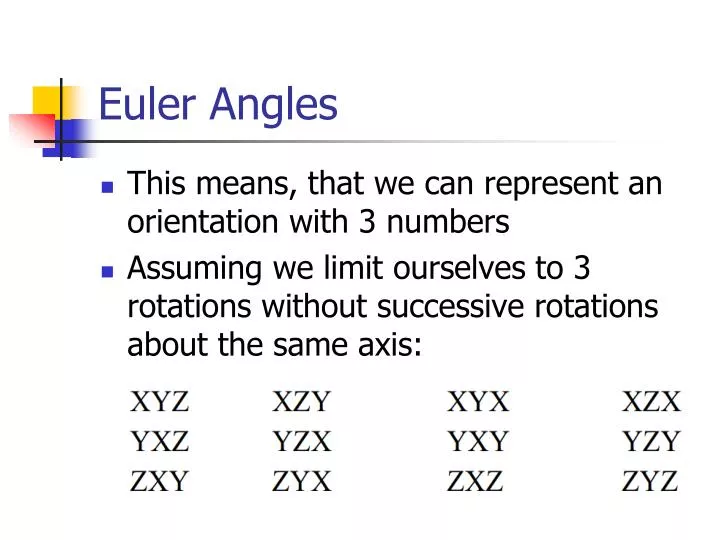
Euler Angles • This means, that we can represent an orientation with 3 numbers • Assuming we limit ourselves to 3 rotations without successive rotations about the same axis:
Gimbal Lock • Gimbal Lock Animation
Euler Summary • Video
Quaternions • Quaternions are a number system that extends the complex numbers • They were first described by Irish mathematician William Rowan Hamilton in 1843 • The quaternions H are equal to , a four-dimensional vector space over the real numbers
Quaternions • A quaternion has 4 components • Of the 4 components one is ‘real’ scalar number, and the other 3 form a vector in imaginary ijk space
Quaternions • Sometimes, they are written as the combination of a scalar value s and a vector v • Where
Quaternions Algebra • The quaternion group has 8 members: • Their product is defined by the equation:
Quaternions - Algebra • Using the same methods, we can get to the following:
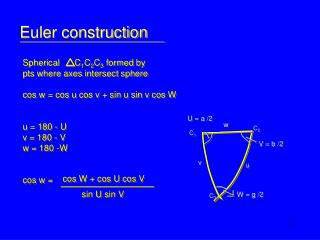
Quaternion Algebra By Euler’s theorem every rotation can be represented as a rotation around some axis with angle . In quaternion terms: Composition of rotations is equivalent to quaternion multiplication.
Example We want to represent a rotation around x-axis by 90 , and then around z-axis by 90 :
Rotating with quaternions We can describe a rotation of a given vector v around a unit vector u by angle : this action is called conjugation. * Pay attention to the inverse of q (like in complex numbers) !
Rotating with quaternions • The rotation matrix corresponding to a rotation by the unit quaternion z = a + bi + cj + dk (with |z| = 1) is given by: Its also possible to calculate the quaternion from rotation matrix: Look at Craig (chapter 2 p.50 )
Rotation Example • If we want to do a rotation by x, y ,z : • This is equal to:
Denavit-Hartenberg • Specialized description of articulated figures • Each joint has only one degree of freedom • rotate around its z-axis • translate along its z-axis • What’s so interesting about 6 DOF ?
Denavit-Hartenberg • Compute the link vector ai and the link length • Attach coordinate frames to the joint axes • Compute the link twist αi • Compute the link offset di • Compute the joint angleφi • Compute the transformation (i-1)Ti which transforms entities from linki to linki-1
Denavit-Hartenberg This transformation is done in several steps : • Rotatethe link twist angle αiaround the axis xi • Translatethe link length aialong the axis xi • Translatethe link offset di along the axis zi • Rotatethe joint angle φi around the axis zi 17
Denavit-Hartenberg Multiplying the matrices : In DH only φ and d are allowed to change. 19
Denavit-Hartenberg • Video
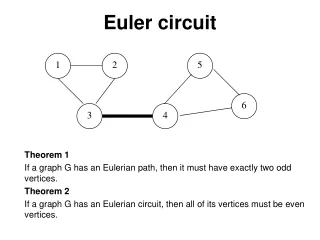
Z3 Z1 Z0 Joint 3 X3 Y0 Y1 Z2 d2 Joint 1 X0 X1 X2 Joint 2 Y2 a0 a1 Example 1 D-H Link Parameter Table : rotation angle from Zi-1 to Zi about Xi : distance from intersection of Zi-1 & Xi to origin of i coordinate along Xi : distance from origin of (i-1) coordinate to intersection of Zi-1 & Xi along Zi-1 : rotation angle from Xi-1to Xi about Zi-1 http://opencourses.emu.edu.tr/file.php/32/lecture%20notes/Denavit-Hartenberg%20Convention.ppt
Example 1 : rotation angle from Zi-1 to Zi about Xi : distance from intersection of Zi-1 & Xi to origin of i coordinate along Xi : distance from origin of (i-1) coordinate to intersection of Zi-1 & Xi along Zi-1 : rotation angle from Xi-1to Xi about Zi-1