Download
1 / 110
1.11k likes | 1.27k Views
Motion from image and inertial measurements. Dennis Strelow Honeywell Advanced Technology Lab. On the web. Related materials: these slides related papers movies VRML models at: http://www.dennis-strelow.com/umn. Introduction (1). From an image sequence, we can recover:

E N D
Motion from image and inertial measurements Dennis Strelow Honeywell Advanced Technology Lab
On the web Related materials: • these slides • related papers • movies • VRML models at: http://www.dennis-strelow.com/umn Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 20062
Introduction (1) From an image sequence, we can recover: • 6 degree of freedom (DOF) camera motion • without knowledge of the camera’s surroundings • without GPS Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 20063
Introduction (2) Fitzgibbon Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 20064
Introduction (3) • Potential applications include: • modeling from video Yuji Uchida Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 20065
Introduction (4) • micro air vehicles (MAVs) AeroVironment Black Widow AeroVironment Microbat Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 20066
Introduction (5) • rover navigation Hyperion Nister, et al. Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 20067
Introduction (6) • search and rescue robots Rhex (movies: http://ai.eecs.umich.edu/Rhex/Movies) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 20068
Introduction (7) • NASA Personal Satellite Assistant (PSA) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 20069
Introduction (8) For these problems, we want: • 6 DOF motion • in unknown environments • without GPS or other absolute positioning Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200610
Introduction (8) For these problems, we want: • 6 DOF motion • in unknown environments • without GPS or other absolute positioning • using small, light, and cheap sensors Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200611
Introduction (8) For these problems, we want: • 6 DOF motion • in unknown environments • without GPS or other absolute positioning • using small, light, and cheap sensors • over the long term Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200612
Introduction (9) Long-term motion estimation: • absolute distance or time is long • only a small fraction of the scene is visible at any one time Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200613
Introduction (10) • given these requirements, cameras are promising sensors… • …and many algorithms for motion from images already exist Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200614
Introduction (11) But, where are the systems for estimating the motion of: over the long term? Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200615
Introduction (12) …and for automatically modeling • rooms • buildings • cities from a handheld camera? Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200616
Introduction (13) Motion from images suffers from some long-standing difficulties This work attacks these problems by… • exploiting image and inertial measurements • robust image feature tracking • recognizing previously mapped locations • exploiting omnidirectional images Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200617
Outline Motion from images refresher bundle adjustment difficulties Motion from image and inertial measurements Robust image feature tracking Long-term motion estimation Conclusion Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200618
Motion from images: refresher (1) A two-step process is common: • sparse feature tracking • estimation Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200619
Motion from images: refresher (1) A two-step process is common: • sparse feature tracking • estimation Sparse feature tracking: • inputs: raw images • outputs: projections Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200620
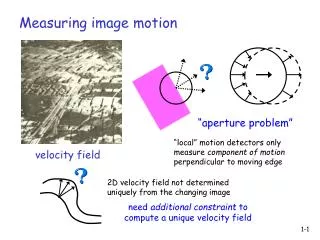
Motion from images: refresher (2) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200621
Motion from images: refresher (3) Template matching: • correlation tracking • Lucas-Kanade (Lucas and Kanade, 1981) Extraction and matching: • Harris features (Harris, 1992) • Scale Invariant Feature Transform (SIFT) keypoints (Lowe, 2004) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200622
Motion from images: refresher (4) The second step is estimation: • inputs: • projections • outputs: • 6 DOF camera position at the time of each image • 3D position of each tracked point Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200623
Motion from images: refresher (5) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200624
Motion from images: refresher (6) • bundle adjustment (various, 1950’s) • Kalman filtering (Broida, Chandrashekhar, and Chellappa, 1990) • variable state dimension filter (VSDF) (McLauchlan, 1996) • two- and three-frame methods(Hartley and Zisserman, 2000; Nister, et al. 2004) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200625
Motion from images: bundle adjustment (1) From tracking, we have the image locations xij for each point j and each image i Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200626
Motion from images: bundle adjustment (2) Suppose we also have estimates of: • the camera rotation ρi and translation ti at time of each image • 3D point positions Xj of each tracked point Then, we can compute reprojections: Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200627
Motion from images: bundle adjustment (3) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200628
Motion from images: bundle adjustment (4) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200629
Motion from images: bundle adjustment (5) So, minimize: with respect to all the ρi, ti, Xj Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200630
Motion from images: bundle adjustment (5) So, minimize: with respect to all the ρi, ti, Xj Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200631
Motion from images: difficulties (1) Estimation step can be very sensitive to… • incorrect or insufficient image feature tracking • camera modeling and calibration errors • outlier detection thresholds • sequences with degenerate camera motions Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200632
Motion from images: difficulties (2) Iterative batch methods have poor convergence or may fail to converge if: • observations are missing • the initial estimate is poor Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200633
Motion from images: difficulties (3) Recursive methods suffer from: • poor prior assumptions on the motion • poor approximations in state error modeling Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200634
Motion from images: difficulties (4) Resulting errors are: • gross local errors • long term drift Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200635
Motion from images: difficulties (5) Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200636
Motion from images: difficulties (6) • 151 images, 23 points • manually corrected Lucas-Kanade Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200637
Motion from images: difficulties (7) • squares: ground truth points • dash-dotted line: accurate estimate • solid line: image-only, bundle adjustment estimate Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200638
Outline Motion from images Motion from image and inertial measurements inertial sensors algorithms and results related work Robust image feature tracking Long-term motion estimation Conclusion Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200639
Motion from image and inertial measurements: inertial sensors (1) • inertial sensors can be integrated to estimate six degree of freedom motion Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200640
Motion from image and inertial measurements: inertial sensors (2) But many applications require small, light, and cheap sensors Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200641
Motion from image and inertial measurements: inertial sensors (3) Integrating the outputs of these low grade sensors will produce drifting motion because of: • noise • unmodeled nonlinearities Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200642
Motion from image and inertial measurements: inertial sensors (4) • And, we can’t even integrate until we can separate the effects of… • rotation ρ • gravity g • acceleration a • slowly changing bias ba • noise n • …in the accelerometer measurements Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200643
Motion from image and inertial measurements: inertial sensors (5) Image and inertial measurements are highly complementary With inertial measurements we can: • decrease sensitivity in image-only estimates • establish two rotation angles without drift • establish the global scale Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200644
Motion from image and inertial measurements: inertial sensors (5) Image and inertial measurements are highly complementary With inertial measurements we can: • decrease sensitivity in image-only estimates • establish two rotation angles without drift • establish the global scale …even with our low-grade sensors Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200645
Motion from image and inertial measurements: inertial sensors (6) With image measurements, we can: • reduce the drift in integrating inertial data • distinguish between… • rotation ρ • gravity g • acceleration a • bias ba • noise n …in accelerometer measurements Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200646
Motion from image and inertial measurements: algorithms and results (1) This work has developed both: • batch • recursive algorithms for motion from image and inertial measurements Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200647
Motion from image and inertial measurements: algorithms and results (2) Gyro measurements: • ω’, ω: measured and actual angular velocity • bω: gyro bias • n: gaussian noise Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200648
Motion from image and inertial measurements: algorithms and results (3) Accelerometer measurements: • ρ: rotation • a’, a: measured and actual acceleration • g: gravity vector • ba: accelerometer bias • n: gaussian noise Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200649
Motion from image and inertial measurements: algorithms and results (4) • batch algorithm minimizes a combined error: Dennis Strelow -- Motion estimation from image and inertial measurements -- March 22. 200650