Download
1 / 25
250 likes | 272 Views
Explore the basics of simple harmonic motion, including position, velocity, acceleration equations, and complex numbers in physics.

E N D
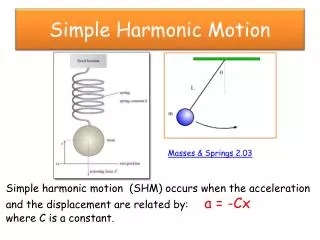
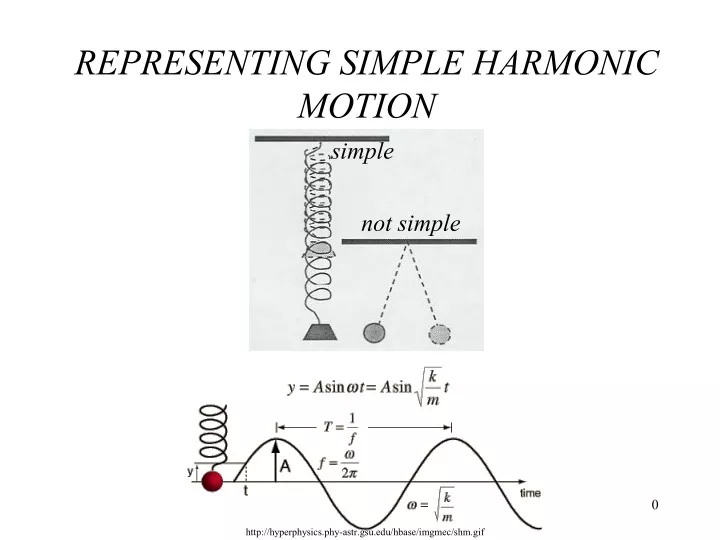
REPRESENTING SIMPLE HARMONIC MOTION simple not simple http://hyperphysics.phy-astr.gsu.edu/hbase/imgmec/shm.gif
Simple Harmonic Motion y(t) Watch as time evolves
period phase angle amplitude angular freq (cyclic) freq determined by initial conditions determined by physical system A -A
Position (cm) Velocity (cm/s) Acceleration (cm/s2) time (s)
These representations of the position of a simple harmonic oscillator as a function of time are all equivalent - there are 2 arbitrary constants in each. Note that A, f, Bp and Bqare REAL; C and Dare COMPLEX. x(t) is real-valued variable in all cases. A: B: C: D: Engrave these on your soul - and know how to derive the relationships among A & f; Bp & Bq; C; and D .
k m k m x Example: initial conditions m = 0.01 kg; k = 36 Nm-1. At t = 0, m is displaced 50mm to the right and is moving to the right at 1.7 ms-1. Express the motion in form A form B
A particle executes simple harmonic motion. When the velocity of the particle is a maximum which one of the following gives the correct values of potential energy and acceleration of the particle. (a)potential energy is maximum and acceleration is maximum. (b)potential energy is maximum and acceleration is zero. (c)potential energy is minimum and acceleration is maximum. (d)potential energy is minimum and acceleration is zero.
A particle executes simple harmonic motion. When the velocity of the particle is a maximum which one of the following gives the correct values of potential energy and acceleration of the particle. (a)potential energy is maximum and acceleration is maximum. (b)potential energy is maximum and acceleration is zero. (c)potential energy is minimum and acceleration is maximum. (d)potential energy is minimum and acceleration is zero. Answer (d). When velocity is maximum displacement is zero so potential energy and acceleration are both zero.
A mass vibrates on the end of the spring. The mass is replaced with another mass and the frequency of oscillation doubles. The mass was changed by a factor of • 1/4 (b) ½ (c) 2 (d) 4
A mass vibrates on the end of the spring. The mass is replaced with another mass and the frequency of oscillation doubles. The mass was changed by a factor of • 1/4 (b) 1/2 (c) 2 (d) 4 • Answer (a). Since the frequency has increased the mass must have decreased. Frequency is inversely proportional to the square root of mass, so to double frequency the mass must • change by a factor of 1/4.
A mass vibrates on the end of the spring. The mass is replaced with another mass and the frequency of oscillation doubles. The maximum acceleration of the mass: • remains the same. • is halved. • is doubled. • is quadrupled.
A mass vibrates on the end of the spring. The mass is replaced with another mass and the frequency of oscillation doubles. The maximum acceleration of the mass: • remains the same. • is halved. • is doubled. • is quadrupled. • Answer (d). Acceleration is proportional to frequency squared. If frequency is doubled than acceleration is quadrupled.
A particle oscillates on the end of a spring and its position as a function of time is shown below. At the moment when the mass is at the point P it has (a) positive velocity and positive acceleration (b) positive velocity and negative acceleration (c) negative velocity and negative acceleration (d) negative velocity and positive acceleration
A particle oscillates on the end of a spring and its position as a function of time is shown below. At the moment when the mass is at the point P it has (a) positive velocity and positive acceleration (b) positive velocity and negative acceleration (c) negative velocity and negative acceleration (d) negative velocity and positive acceleration Answer (b). The slope is positive so velocity is positive. Since the slope is getting smaller with time the acceleration is negative.
Imag |z| b f Real a Complex numbers Argand diagram
Equate real parts: Equate imaginary parts: Consistency argument If these represent the same thing, then the assumed Euler relationship says:
Imag t = T0/4 t = 0, T0, 2T0 Real t = t PHASOR
Imag Real Adding complex numbers is easy in rectangular form b a c d
Imag q+f Real Multiplication and division of complex numbers is easy in polar form |z| q f |w|
Imag Real Another important idea is the COMPLEX CONJUGATE of a complex number. To form the c.c., change i -> -i |z| b f a The product of a complex number and its complex conjugate is REAL. We say “zz* equals mod z squared”
And finally, rationalizing complex numbers, or: what to do when there's an i in the denominator?
Using complex numbers: initial conditions. Same example as before, but now use the "C" and "D" forms k m k m x m = 0.01 kg; k = 36 Nm-1. At t = 0, m is displaced 50mm to the right and is moving to the right at 1.7 ms-1. Express the motion in form C form D