Download
1 / 23
230 likes | 358 Views
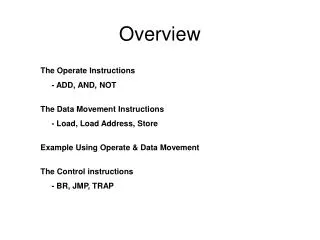
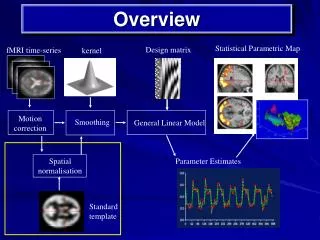
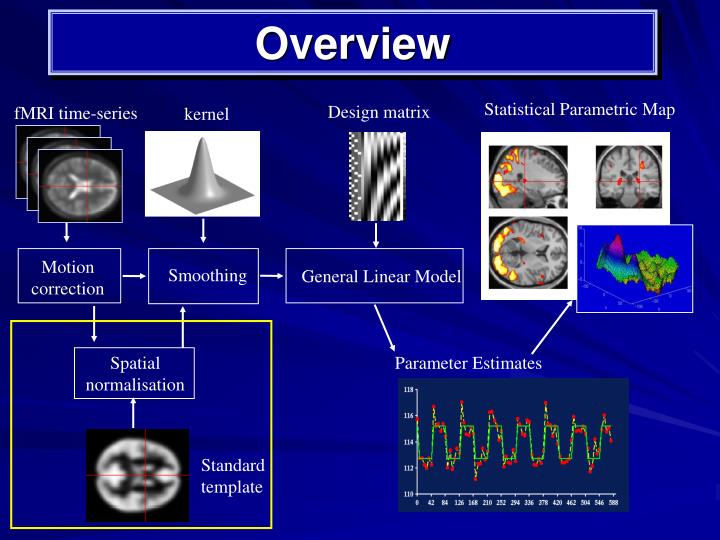
Statistical Parametric Map. Design matrix. fMRI time-series. kernel. Motion correction. Smoothing. General Linear Model. Spatial normalisation. Parameter Estimates. Standard template. Overview. PHJ. a) Direct Normalization i ) Realign -> Slice Time* -> Normalization -> Smoothing

E N D
Statistical Parametric Map Design matrix fMRI time-series kernel Motion correction Smoothing General Linear Model Spatial normalisation Parameter Estimates Standard template Overview
PHJ a) Direct Normalization i) Realign -> Slice Time* -> Normalization -> Smoothing b) Indirect Normalization • Realign -> Slice Time* -> Coregistration -> Segmentation -> Normalization ->Smoothing * optional
Realignment fMRI time-series • Aligns all volumes of all runs spatially • Rigid-body transformation: three translations, three rotations • Objective function: mean squared error of corresponding voxel intensities • Voxel correspondence via Interpolation REALIGN Motion corrected Mean functional Signal, Noise and Preprocessing
Realignment Output: Parameters Signal, Noise and Preprocessing
The preprocessing sequence revisted • Realignment • Motion correction: Adjust for movement between slices • Coregistration • Overlay structural and functional images: Link functional scans to anatomical scan • Normalisation • Warp images to fit to a standard template brain • Smoothing • To increase signal-to-noise ratio • Extras (optional) • Slice timing correction; unwarping
Co-registration • Term co-registration applies to any method for aligning images • By this token, motion correction is also co-registration • However, term is usually used to refer to alignment of images from different modalities. E.g.: • Low resolution T2* fMRI scan (EPI image) to high resolution, T1, structural image from the same individual
Co-registration: Principles behind this step of processing • When several images of the same participants have been acquired, it is useful to have them all in register • Image registration involves estimating a set of parameters describing a spatial transformation that ‘best ‘ matches the images together
fMRI to structural • Matching the functional image to the structural image • Overlaying activation on individual anatomy • Better spatial image for normalisation • Two significant differences between co-registering to structural scans and motion correction • When co-registering to structural, the images do not have the same signal intensity in the same areas; they cannot be subtracted • They may not be the same shape
Problem: Images are different • Differences in signal intensity between the images • Normalise to appropriate template (EPI to EPI; T1 to T1), then segment
Segmentation • Use the gray/white estimates from the normalisation step as starting estimates of the probability of each voxel being grey or white matter • Estimate the mean and variance of the gray/white matter signal intensities • Reassign probabilities for voxels on basis of • Probability map from template • Signal intensity and distributions of intensity for gray/white matter • Iterate until there is a good fit
Register segmented images • Grey/white/CSF probability images for EPI (T2*) and T1 • Combined least squares match (simultaneously) of gray/white/CSF images of EPI (T2*) + T1 segmented images
The preprocessing sequence revisted • Realignment • Motion correction: Adjust for movement between slices • Coregistration • Overlay structural and functional images: Link functional scans to anatomical scan • Normalisation • Warp images to fit to a standard template brain • Smoothing • To increase signal-to-noise ratio • Extras (optional) • Slice timing correction; unwarping
Normalisation Goal: Register images from different participants into roughly the same co-ordinate system (where the co-ordinate system is defined by a template image) • This enables: • Signal averaging across participants: • Derive group statistics -> generalise findings to population • Identify commonalities and differences between groups (e.g., patient vs. healthy) • Report results in standard co-ordinate system (e.g. Talairach and Tournoux stereotactic space)
Standard spaces The Talairach Atlas The MNI/ICBM AVG152 Template The MNI template follows the convention of T&T, but doesn’t match the particular brainRecommended reading: http://imaging.mrc-cbu.cam.ac.uk/imaging/MniTalairach
SPM: Spatial Normalisation • SPM adopts a two-stage procedure to determine a transformation that minimises the sum of squared differences between images: • Step 1: Linear transformation (12-parameter affine) • Step 2: Non-linear transformation (warping) • High-dimensionality problem • The affine and warping transformations are constrained within an empirical Bayesian framework (i.e., using prior knowledge of the variability of head shape and size): “maximum a posteriori” (MAP)estimates of the registration parameters
Step 1: Affine Transformation Determines the optimum 12-parameter affine transformation to match the size and position of the images 12 parameters = 3 translations and 3 rotations (rigid-body) + 3 shears and 3 zooms Rotation Shear Translation Zoom
Step 2: Non-linear Registration • Assumes prior approximate registration with 12-parameter affine step • Modelled by linear combinations of smooth discrete cosine basis functions (3D) • Choice of basis functions depend on distribution of warps likely to be required • For speed and simplicity, uses a “small” number of parameters (~1000)
2-D visualisation (horizontal and vertical deformations): • Brain • visualisation: Ashburner; HBF Chap 3 Source Template Deformation field Warped image
Smoothing • Why blurring the data? • Improves spatial overlap by blurring over anatomical differences • Suppresses thermal noise (averaging) • Increases sensitivity to effects of similar scale to kernel (matched filter theorem) • Makes data more normally distributed (central limit theorem) • Reduces the effective number of multiple comparisons Kernel SMOOTH • How is it implemented? • Convolution with a 3D Gaussian kernel, of specified full-width at half-maximum (FWHM) in mm MNI Space Signal, Noise and Preprocessing GLM
Smoothing Lars Kasper: A Toolbox