Download
1 / 60
680 likes | 1.29k Views
Chapters 10, 11 Rotation and angular momentum. Rotation of a rigid body We consider rotational motion of a rigid body about a fixed axis Rigid body rotates with all its parts locked together and without any change in its shape Fixed axis : it does not move during the rotation

E N D
Chapters 10, 11 Rotation and angular momentum
Rotation of a rigid body • We consider rotational motion of a rigid body about a fixed axis • Rigid body rotates with all its parts locked together and without any change in its shape • Fixed axis: it does not move during the rotation • This axis is called axis of rotation • Reference line is introduced
Angular position • Reference line is fixed in the body, is perpendicular to the rotation axis, intersects the rotation axis, and rotates with the body • Angular position – the angle (in radians or degrees) of the reference line relative to a fixed direction (zero angular position)
Angular displacement • Angular displacement – the change in angular position. • Angular displacement is considered positive in the CCW direction and holds for the rigid body as a whole and every part within that body
Angular velocity • Average angular velocity • Instantaneous angular velocity – the rate of change in angular position
Angular acceleration • Average angular acceleration • Instantaneous angular acceleration – the rate of change in angular velocity
Rotation with constant angular acceleration • Similarly to the case of 1D motion with a constant acceleration we can derive a set of formulas:
Chapter 10 Problem 6 A rotating wheel requires 3.00 s to rotate through 37.0 revolutions. Its angular speed at the end of the 3.00-s interval is 98.0 rad/s. What is the constant angular acceleration of the wheel?
Relating the linear and angular variables: position • For a point on a reference line at a distance r from the rotation axis: • θis measured in radians
Relating the linear and angular variables: speed • ωis measured in rad/s • Period (recall Ch. 4)
Relating the linear and angular variables: acceleration • αis measured in rad/s2 • Centripetal acceleration (Ch. 4)
Rotational kinetic energy • We consider a system of particles participating in rotational motion • Kinetic energy of this system is • Then
Moment of inertia • From the previous slide • Defining moment of inertia (rotational inertia) as • We obtain for rotational kinetic energy
Moment of inertia: rigid body • For a rigid body with volume V and density ρ(V) we generalize the definition of a rotational inertia: • This integral can be calculated for different shapes and density distributions • For a constant density and the rotation axis going through the center of mass the rotational inertia for 9 common body shapes is given in Table 10-2 (next slide)
Moment of inertia: rigid body • The rotational inertia of a rigid body depends on the position and orientation of the axis of rotation relative to the body
Parallel-axis theorem • Rotational inertia of a rigid body with the rotation axis, which is perpendicular to the xy plane and going through point P: • Let us choose a reference frame, in which the center of mass coincides with the origin
R Parallel-axis theorem
Chapter 10 Problem 22 Rigid rods of negligible mass lying along the y axis connect three particles. The system rotates about the x axis with an angular speed of 2.00 rad/s. Find (a) the moment of inertia about the x axis and the total rotational kinetic energy and (b) the tangential speed of each particle and the total kinetic energy. (c) Compare the answers for kinetic energy in parts (a) and (b).
Torque • We apply a force at point P to a rigid body that is free to rotate about an axis passing through O • Only the tangential component Ft = F sin φ of the force will be able to cause rotation
Torque • The ability to rotate will also depend on how far from the rotation axis the force is applied • Torque (turning action of a force): • SI unit: N*m (don’t confuse with J)
Torque • Torque: • Moment arm: r┴= r sinφ • Torque can be redefined as: • force times moment arm • τ = F r┴
Newton’s Second Law for rotation • Consider a particle rotating under the influence of a force • For tangential components • Similar derivation for rigid body
Chapter 10 Problem 39 An electric motor turns a flywheel through a drive belt that joins a pulley on the motor and a pulley that is rigidly attached to the flywheel. The flywheel is a solid disk with a mass of 80.0 kg and a diameter of 1.25 m. It turns on a frictionless axle. Its pulley has much smaller mass and a radius of 0.230 m. The tension in the upper (taut) segment of the belt is 135 N, and the flywheel has a clockwise angular acceleration of 1.67 rad/s2. Find the tension in the lower (slack) segment of the belt.
Rotational work • Work • Power • Work – kinetic energy theorem
Corresponding relations for translational and rotational motion
Smooth rolling • Smooth rolling – object is rolling without slipping or bouncing on the surface • Center of mass is moving at speed vCM • Point P (point of momentary contact between two surfaces) is moving at speed vCM • s = θR • ds/dt = d(θR)/dt = R dθ/dt • vCM = ds/dt = ωR
Rolling: translation and rotation combined • Rotation – all points on the wheel move with the same angular speed ω • Translation – all point on the wheel move with the same linear speed vCM
Chapter 10 Problem 53 A cylinder of mass 10.0 kg rolls without slipping on a horizontal surface. At a certain instant its center of mass has a speed of 10.0 m/s. Determine (a) the translational kinetic energy of its center of mass, (b) the rotational kinetic energy about its center of mass, and (c) its total energy.
Rolling: pure rotation • Rolling can be viewed as a pure rotation around the axis P moving with the linear speed vcom • The speed of the top of the rolling wheel will be • vtop = (ω)(2R) • = 2(ωR) = 2vCM
Friction and rolling • Smooth rolling is an idealized mathematical description of a complicated process • In a uniform smooth rolling, P is at rest, so there’s no tendency to slide and hence no friction force • In case of an accelerated smooth rolling • aCM = αR • fsopposes tendency to slide
Rolling down a ramp Fnet,x = M aCM,x fs – M g sin θ = M aCM,x R fs = ICMα α = – aCM,x / R fs = – ICMaCM,x / R2
Vector product of two vectors • The result of the vector (cross) multiplication of two vectors is a vector • The magnitude of this vector is • Angleφ is the smaller of the two angles between and
Vector product of two vectors • Vector is perpendicular to the plane that contains vectors and and its direction is determined by the right-hand rule • Because of the right-hand rule, the order of multiplication is important (commutative law does not apply) • For unit vectors
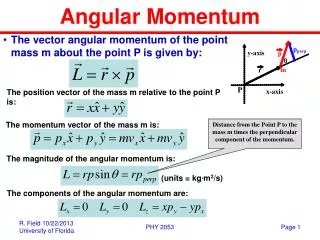
Torque revisited • Using vector product, we can redefine torque (vector) as:
Angular momentum • Angular momentum of a particle of mass m and velocity with respect to the origin O is defined as • SI unit: kg*m2/s
Chapter 11 Problem 15 A particle of mass m moves in a circle of radius R at a constant speed. The motion begins at point Q at time t = 0. Determine the angular momentum of the particle about point P as a function of time.
Angular momentum of a rigid body • A rigid body (a collection of elementary masses Δmi) rotates about a fixed axis with constant angular speed ω • Δmi is described by
Conservation of angular momentum • From the Newton’s Second Law • If the net torque acting on a system is zero, then • If no net external torque acts on a system of particles, the total angular momentum of the system is conserved (constant) • This rule applies independently to all components