Download
1 / 1
10 likes | 79 Views
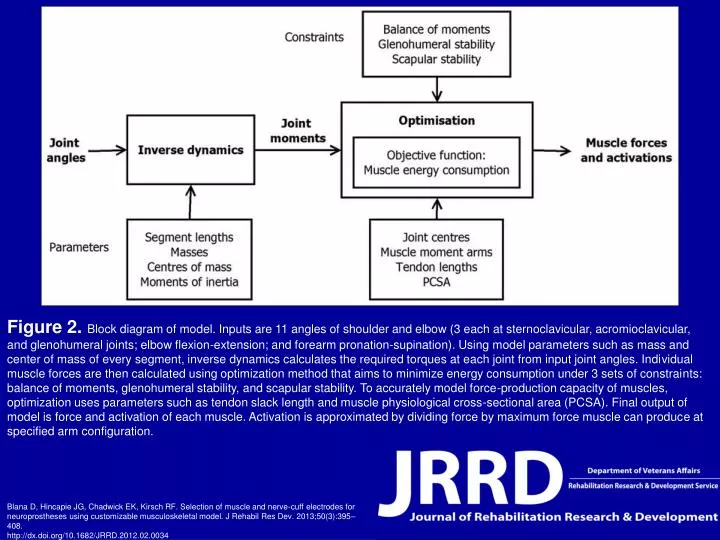
This model uses joint angles to calculate torques, then optimizes muscles' forces under constraints for stability and energy efficiency, outputting muscle forces and activations.

E N D
Figure 2. Block diagram of model. Inputs are 11 angles of shoulder and elbow (3 each at sternoclavicular, acromioclavicular, and glenohumeral joints; elbow flexion-extension; and forearm pronation-supination). Using model parameters such as mass and center of mass of every segment, inverse dynamics calculates the required torques at each joint from input joint angles. Individual muscle forces are then calculated using optimization method that aims to minimize energy consumption under 3 sets of constraints: balance of moments, glenohumeral stability, and scapular stability. To accurately model force-production capacity of muscles, optimization uses parameters such as tendon slack length and muscle physiological cross-sectional area (PCSA). Final output of model is force and activation of each muscle. Activation is approximated by dividing force by maximum force muscle can produce at specified arm configuration. Blana D, Hincapie JG, Chadwick EK, Kirsch RF. Selection of muscle and nerve-cuff electrodes for neuroprostheses using customizable musculoskeletal model. J Rehabil Res Dev. 2013;50(3):395–408.http://dx.doi.org/10.1682/JRRD.2012.02.0034
