Download
1 / 1
10 likes | 123 Views
Robot-3. Robot-1. Robot-2. Center for Embedded Networked Sensing. Deployment via Iteration and Mobility. Tom Schoellhammer 1 , Sameera Poduri 2 , Amarjeet Singh 3 , Bin Zhang 2 1 CSL – http://lecs.cs.ucla.edu 2 RESL – http://robotics.usc.edu/resl 3 EE http://ee.ucla.edu.

E N D
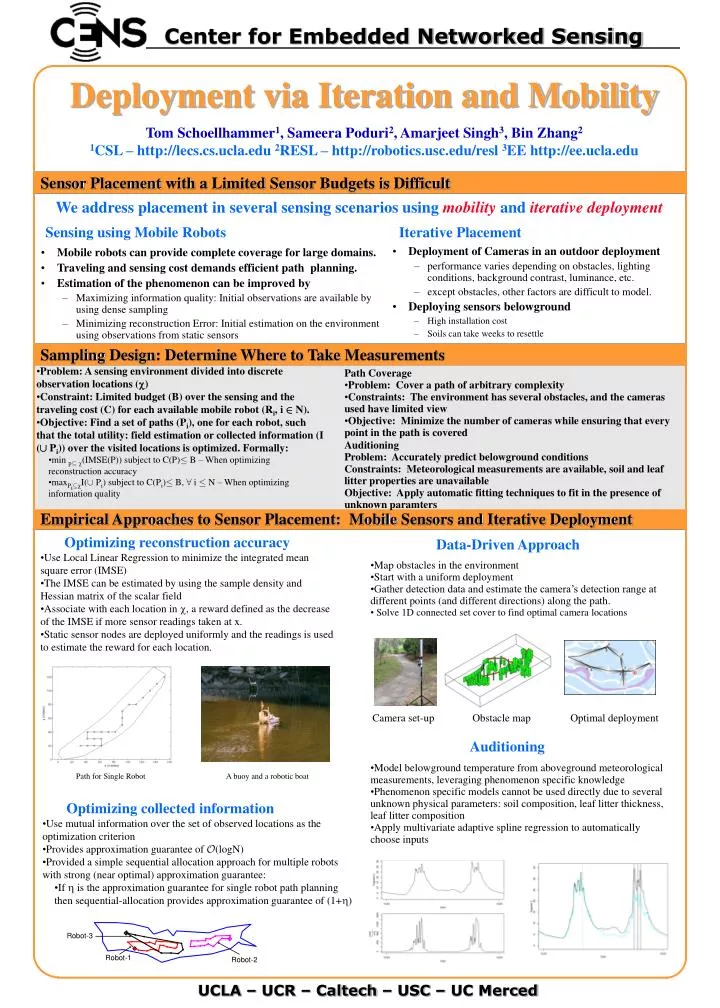
Robot-3 Robot-1 Robot-2 Center for Embedded Networked Sensing Deployment via Iteration and Mobility Tom Schoellhammer1, Sameera Poduri2, Amarjeet Singh3, Bin Zhang2 1CSL – http://lecs.cs.ucla.edu 2RESL – http://robotics.usc.edu/resl 3EE http://ee.ucla.edu Sensor Placement with a Limited Sensor Budgets is Difficult We address placement in several sensing scenarios using mobility and iterative deployment Sensing using Mobile Robots Iterative Placement • Deployment of Cameras in an outdoor deployment • performance varies depending on obstacles, lighting conditions, background contrast, luminance, etc. • except obstacles, other factors are difficult to model. • Deploying sensors belowground • High installation cost • Soils can take weeks to resettle • Mobile robots can provide complete coverage for large domains. • Traveling and sensing cost demands efficient path planning. • Estimation of the phenomenon can be improved by • Maximizing information quality:Initial observations are available by using dense sampling • Minimizing reconstruction Error: Initial estimation on the environment using observations from static sensors Sampling Design: Determine Where to Take Measurements • Problem: A sensing environment divided into discrete observation locations () • Constraint: Limited budget (B) over the sensing and the traveling cost (C) for each available mobile robot (Ri, i 2 N). • Objective: Find a set of paths (Pi), one for each robot, such that the total utility: field estimation or collected information (I ([ Pi)) over the visited locations is optimized. Formally: • min pµ (IMSE(P)) subject to C(P)· B – When optimizing reconstruction accuracy • maxPiµI([ Pi) subject to C(Pi)· B, 8 i · N – When optimizing information quality Path Coverage • Problem: Cover a path of arbitrary complexity • Constraints: The environment has several obstacles, and the cameras used have limited view • Objective: Minimize the number of cameras while ensuring that every point in the path is covered Auditioning Problem: Accurately predict belowground conditions Constraints: Meteorological measurements are available, soil and leaf litter properties are unavailable Objective: Apply automatic fitting techniques to fit in the presence of unknown paramters Empirical Approaches to Sensor Placement: Mobile Sensors and Iterative Deployment Optimizing reconstruction accuracy • Use Local Linear Regression to minimize the integrated mean square error (IMSE) • The IMSE can be estimated by using the sample density and Hessian matrix of the scalar field • Associate with each location in , a reward defined as the decrease of the IMSE if more sensor readings taken at x. • Static sensor nodes are deployed uniformly and the readings is used to estimate the reward for each location. Data-Driven Approach • Map obstacles in the environment • Start with a uniform deployment • Gather detection data and estimate the camera’s detection range at different points (and different directions) along the path. • Solve 1D connected set cover to find optimal camera locations Camera set-up Obstacle map Optimal deployment Auditioning • Model belowground temperature from aboveground meteorological measurements, leveraging phenomenon specific knowledge • Phenomenon specific models cannot be used directly due to several unknown physical parameters: soil composition, leaf litter thickness, leaf litter composition • Apply multivariate adaptive spline regression to automatically choose inputs Path for Single Robot A buoy and a robotic boat Optimizing collected information • Use mutual information over the set of observed locations as the optimization criterion • Provides approximation guarantee of O(logN) • Provided a simple sequential allocation approach for multiple robots with strong (near optimal) approximation guarantee: • If is the approximation guarantee for single robot path planning then sequential-allocation provides approximation guarantee of (1+) UCLA – UCR – Caltech – USC – UC Merced