Download
1 / 1
10 likes | 153 Views
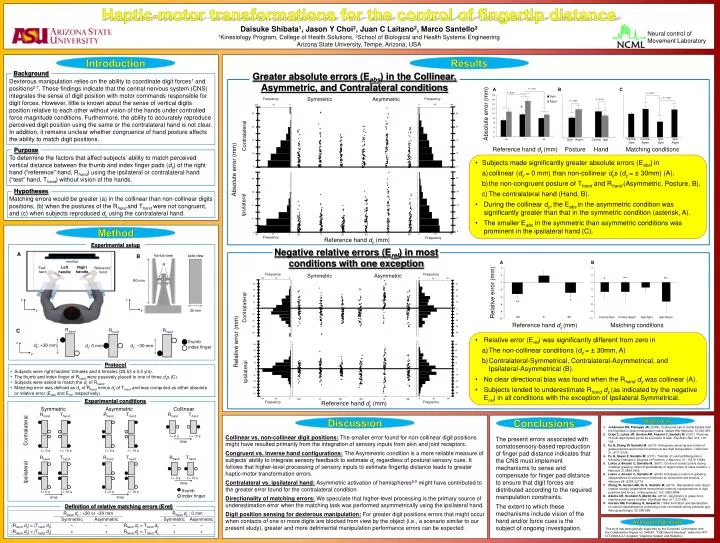
A. B. P = 0.012. Symmetric. Asymmetric. P = 0.001. Frequency. Frequency. Frequency. Frequency. Symmetric. Asymmetric. Haptic -motor transformations for the control of fingertip distance Daisuke Shibata 1 , Jason Y Choi 2 , Juan C Laitano 2 , Marco Santello 2

E N D
A B P = 0.012 Symmetric Asymmetric P = 0.001 Frequency Frequency Frequency Frequency Symmetric Asymmetric Haptic-motor transformations for the control of fingertip distance Daisuke Shibata1, Jason Y Choi2, Juan C Laitano2, Marco Santello2 1Kinesiology Program, College of Health Solutions, 2School of Biological and Health Systems Engineering Arizona State University, Tempe, Arizona, USA 30 60 0 50 100 0 60 0 60 0 0 50 30 100 100 0 P = 0.014 P = 0.001 40 40 40 40 40 40 40 40 A B * 30 30 30 30 Relative error (mm) 20 20 20 20 Absolute error (mm) 30 30 30 30 10 10 10 10 Contralateral Contralateral Absolute error (mm) ** ** 0 Relative error (mm) * 0 0 0 20 20 20 20 Neural control of Movement Laboratory -10 -10 -10 -10 x z -20 -20 -20 z 10 10 10 10 -30 -30 -30 Sym. Asym. Contra. Ipsi. -40 -40 -40 -40 * 0 0 0 ** 0 y y C Reference hand dy(mm) y Posture Hand P = 0.001 P = 0.001 -30 0 30 Introduction Results Contra-Sym Contra-Asym Ipsi-Sym Ipsi-Asym Reference hand dy(mm) Matching conditions Ipsilateral Ipsilateral Background Greater absolute errors (Eabs) in the Collinear, Asymmetric, and Contralateral conditions -20 thumb Dexterous manipulation relies on the ability to coordinate digit forces1 and positions2-7. These findings indicate that the central nervous system (CNS) integrates the sense of digit position with motor commands responsible for digit forces. However, little is known about the sense of vertical digits position relative to each other without vision of the hands under controlled force magnitude conditions. Furthermore, the ability to accurately reproduce perceived digit position using the same or the contralateral hand is not clear. In addition, it remains unclear whether congruence of hand posture affects the ability to match digit positions. thumb -30 index finger index finger 30 -30 0 30 -30 0 30 0 30 -30 30 -30 0 50 100 50 0 Reference hand dy (mm) Frequency 0 30 Frequency 60 Frequency Frequency Contra-Asym Ipsi-Sym Ipsi-Asym Contra-Sym Reference hand dy (mm) Matching conditions Purpose • To determine the factors that affect subjects’ ability to match perceived vertical distance between the thumb and index finger pads (dy) of the right hand (“reference” hand, Rhand) using the ipsilateral or contralateral hand (“test” hand, Thand) without vision of the hands. • Subjects made significantly greater absolute errors (Eabs)in • collinear (dy= 0 mm) than non-collinear dys(dy= ± 30mm) (A), • the non-congruent posture of Thand and Rhand(Asymmetric, Posture, B), • The contralateral hand (Hand, B). • During the collinear dy,the Eabsin the asymmetric condition was significantly greater than that in the symmetric condition (asterisk, A). • The smaller Eabs in the symmetric than asymmetric conditions was prominent in the ipsilateralhand (C). Hypotheses Matching errorawould be greater (a) in the collinear than non-collinear digits positions, (b) when the postures of the Rhandand Thand were not congruent, and (c) when subjects reproduced dy using the contralateral hand. Method Experimental setup Negative relative errors (Erel) in most conditions with one exception A B frontal view side view monitor a Right handle Left handle “Test” hand “Reference” hand 80 mm 30 mm Rhand Rhand Rhand C • Relative error (Erel) was significantly different from zero in • The non-collinear conditions (dy= ± 30mm, A) • Contralateral-Symmetrical, Contralateral-Asymmetrical, and Ipsilateral-Asymmetrical (B). • No clear directional bias was found when the Rhanddy was collinear (A). • Subjects tended to underestimate Rhanddy(as indicated by the negative Erel) in all conditions with the exception of Ipsilateral Symmetrical. dy: +30 mm dy: 0 mm dy: −30 mm Protocol • Subjects were right-handed 10males and 5 females (23.53 ± 4.5 yrs). • The thumb and index finger of Rhand were passively placed to one of three dys (C). • Subjects were asked to match the dy of Rhand. • Matching error was defined as dy of Rhand minus dy of Thand and was computed as either absolute or relative error (Eabs and Erel, respectively). Experimental conditions Symmetric Asymmetric Collinear Rhand Thand Rhand Thand Rhand Thand References Discussion Conclusions • Johansson RS, Flanagan JR.(2009). Coding and use of tactile signals from the fingertips in object manipulation tasks. Nature Rev Neurosci.10:345-359. • Crajé C, Lukos JR, Gordon AM, Ansuini C, Santello M. (2011). Planning of multi-digit contact points as a function of task. Exp Brain Res. 212: 119-124. • Fu Q, Zhang W, Santello M. (2010). Anticipatory planning and control of grasp positions and forces for dexterous two-digit manipulation. J Neurosci. 31: 9117-9126. • Fu Q, Hasan Z, Santello M. (2011). Transfer of Learned Manipulation following Changes in Degrees of Freedom. J Neurosci. 31: 13576-13584. • LukosJ, Ansuini C, Santello M. (2007). Choice of contact points during multidigit grasping: effect of predictability of object center of mass location. J Neurosci27:3894-3903. • Lukos J, Ansuini C, Santello M. (2008). Anticipatory control of grasping: independence of sensorimotor memories for kinematics and kinetics. J Neurosci28:12765-12774. • Zhang W, Gordon AM, Fu Q, Santello M. (2010). Manipulation after object rotation reveals independent sensorimotor memory representations of digit positions and forces. J Neurophysiol. 103: 2953-2964. • Adamo DE, Scotland S, Martin BJ. (2012 ). Asymmetry in grasp force matching and sense of effort. Exp Brain Res. 217: 273-285. • Gordon AM, Forssberg H, Iwasaki N. (1994).Formation and lateralization of internal representations underlying motor commands during precision grip. Neuropsychologia. 32: 555-568. Contralateral Collinear vs. non-collinear digit positions:The smaller error found for non-collinear digit positions might have resulted primarily from the integration of sensory inputs from skin and joint receptors. Congruent vs. inverse hand configurations:The Asymmetric condition is a more reliable measure of subjects’ ability to integrate sensory feedback to estimate dy regardless of postural sensory cues. It follows that higher-level processing of sensory inputs to estimate fingertip distance leads to greater haptic-motor transformation errors. Contralateral vs. ipsilateral hand:Asymmetric activation of hemispheres8-9 might have contributed to the greater error found for the contralateral condition. Directionality of matching errors:We speculate that higher-level processing is the primary source of underestimation error when the matching task was performed asymmetrically using the ipsilateral hand. Digit position sensing for dexterous manipulation:For greater digit positions errors that might occur when contacts of one or more digits are blocked from view by the object (i.e., a scenario similar to our present study), greater and more detrimental manipulation performance errors can be expected . t = 0 s t = 10 s The present errors associated with somatosensory-based reproduction of finger pad distance indicates that the CNS must implement mechanisms to sense and compensate for finger pad distance to ensure that digit forces are distributed according to the required manipulation constraints. The extent to which these mechanisms include vision of the hand and/or force cues is the subject of ongoing investigation. time t = 0 s t = 10 s t = 0 s t = 10 s Rhand Thand Rhand Thand Rhand Thand Ipsilateral t = 0 s t = 10 s time t = 0 s t = 10 s t = 0 s t = 10 s time time Definition of relative matching errors (Erel) Acknowledgements This work has been partially supported by the European Commission with the Collaborative Project no. 248587, “THE Hand Embodied”, within the FP7-ICT-2009-4-2-1 program “Cognitive System and Robotics”.