Download
1 / 1
10 likes | 126 Views
(a) Model 2. (a) Model 1. (b) Waveforms. (b) Waveforms. Rupture Initiation.

E N D
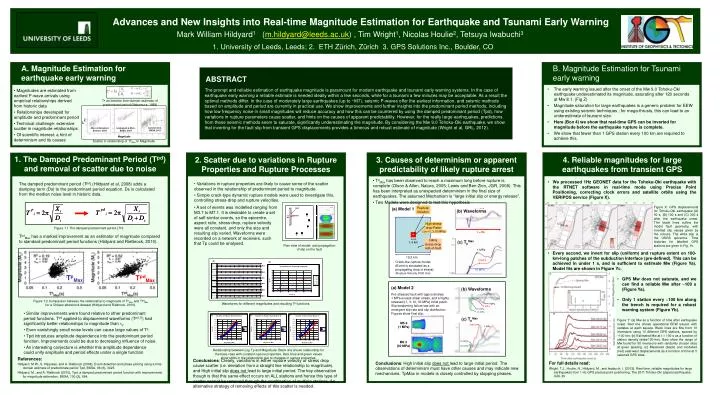
(a) Model 2 (a) Model 1 (b) Waveforms (b) Waveforms Rupture Initiation Pre-stressed fault with approximately 1 MPa excess shear stress, and a highly stressed (1, 3, 10, 30 MPa) initial patch. Slip-weakening failure law with an emergent slip rate and slip distribution. Figures show final slip. High stress-drop Patch (Ds =1, 3,10 MPa) (c) TpMax * (c) TpMax M5.9(1 MPa) 1MPa stress-drop rest-of-fault 1.4 km 1 MPa M6.3(30 MPa) 19.2 km 3 MPa Crack-like rupture model. (Event is simulated as a propagating drop in stress) (Rupture Velocity 3000 m/s) 10 MPa TpMax TpMax TpdMax Lancieri et al, BSSA, 2011 Allen & Kanamori, Science, 2003 Lockwood & Allen, BSSA, 2007 Magnitude Advances and New Insights into Real-time Magnitude Estimation for Earthquake and Tsunami Early Warning Mark William Hildyard1 (m.hildyard@leeds.ac.uk) , Tim Wright1, Nicolas Houlie2, Tetsuya Iwabuchi3 1. University of Leeds, Leeds; 2. ETH Zürich, Zürich 3. GPS Solutions Inc., Boulder, CO A. Magnitude Estimation for earthquake early warning B. Magnitude Estimation for Tsunami early warning ABSTRACT • The early warning issued after the onset of the Mw 9.0 Tohoku-Oki earthquake underestimated its magnitude, saturating after 120 seconds at Mw 8.1. (Fig Z) • Magnitude saturation for large earthquakes is a generic problem for EEW using existing seismic techniques ; for mega-thrusts, this can lead to an underestimate of tsunami size. • Here (Box 4) we show that real-time GPS can be inverted for magnitude before the earthquake rupture is complete. • We show that fewer than 1 GPS station every 100 km are required to achieve this. The prompt and reliable estimation of earthquake magnitude is paramount for modern earthquake and tsunami early warning systems. In the case of earthquake early warning a reliable estimate is needed ideally within a few seconds, while for a tsunami a few minutes may be acceptable. As a result the optimal methods differ. In the case of moderately large earthquakes (up to ~M7), seismic P-waves offer the earliest information, and seismic methods based on amplitude and period are currently in practical use. We show improvements and further insights into the predominant period methods, including how low frequency noise in small magnitudes will reduce accuracy and how this can be countered by using the damped predominant period (Tpd), how variations in rupture parameters cause scatter, and hints on the causes of apparent predictability. However, for the really large earthquakes, predictions from these seismic methods seem to saturate, significantly underestimating the magnitude. By considering the Mw 9.0 Tohoku-Oki earthquake, we show that inverting for the fault slip from transient GPS displacements provides a timeous and robust estimate of magnitude (Wright et al, GRL, 2012). • Magnitudes are estimated from earliest P-wave arrivals using empirical relationships derived from historic data • Relationships developed for amplitude and predominant period • Technical challenge: extensive scatter in magnitude relationships • Of scientific interest: a hint of determinism and its causes Tp an iterative time-domain estimator of predominant period (Nakamura, 1988) Scatter in relationship of TpMax to Magnitude 1. The Damped Predominant Period (Tpd) and removal of scatter due to noise 2. Scatter due to variations in Rupture Properties and Rupture Processes 3. Causes of determinism or apparent predictability of likely rupture arrest 4. Reliable magnitudes for large earthquakes from transient GPS • TpMax has been observed to reach a maximum long before rupture is complete (Olson & Allen, Nature, 2005; Lewis and Ben-Zion, JGR, 2008). This has been interpreted as unexpected determinism in the final size of earthquakes. The assumed Mechanism is “large initial slip or energy release”. • Two Models were designed to test this hypothesis • We processed 1Hz GEONET data for the Tohoku-Oki earthquake with the RTNET software in real-time mode using Precise Point Positioning, correcting clock errors and satellite orbits using the VERIPOS service (Figure X). • Variations in rupture properties are likely to cause some of the scatter observed in the relationship of predominant period to magnitude. • Simple crack-type dynamic rupture models were used to investigate this, controlling stress-drop and rupture velocities. The damped predominant period (Tpd) (Hildyard et al, 2008) adds a damping term (Ds) to the predominant period equation. Ds is calculated from the median noise level in historic data. • A set of events was modelled ranging from M3.7 to M7.1. It is desirable to create a set of self-similar events, so the epicentre, aspect ratio, stress-drop, rupture velocity were all constant, and only the size and resulting slip varied. Waveforms were recorded on a network of receivers, such that Tp could be analysed. Figure X: GPS displacements for Tohoku-Oki earthquake (A) 50 s, (B) 100 s and (C) 300 s after the earthquake onset. Thin black lines outline the model fault geometry, with inverted slip values given by the colours. The white star is the USGS epicentre. Time histories for labelled GPS stations are given in Fig. Yc. Figure 1.1 The damped predominant period (Tpd) TpdMax has a marked improvement as an estimator of magnitude compared to standard predominant period functions (Hildyard and Rietbrock, 2010). Plan view of model, and propagation of slip on the fault • Every second, we invert for slip (uniform) and rupture extent on 100-km-long patches of the subduction interface (pre-defined). This can be achieved in under 1 s, and is sufficient to estimate Mw (Figure Ya). Model fits are shown in Figure Yc. • GPS Mw does not saturate, and we can find a reliable Mw after ~100 s (Figure Ya). • Only 1 station every ~100 km along the trench is required for a robust warning system (Figure Yb). Figure 1.2 Comparison between the relationship to magnitude of TpMax and TpdMaxfor a Chilean aftershock dataset (Hildyard and Rietbrock, 2010). Waveforms for different magnitudes and resulting Tp functions • Similar improvements were found relative to other predominant period functions. Tpd applied to displacement waveforms (Tpd_D) had significantly better relationships to magnitude than tc. • Even vanishingly small noise levels can cause large values of Tp. • Tpd introduces amplitude dependence into the predominant period function. Improvements could be due to decreasing influence of noise. • An interesting conjecture is whether this amplitude dependence could unify amplitude and period effects under a single function c Figure Y: (a) Mw as a function of time after earthquake onset. Red line shows operational EEW issued, with updates at each square. Black lines are Mw from 10 inversions using 10 different GPS stations, spaced by ~100 km; (b) Estimated Mw at t = 100 s as a function of station density (sites/100 km). Bars show the range of Mw found for 50 inversions with randomly chosen sites at given spacing. (c) Measured (black) and modelled (red) east-west displacements as a function of time at 5 selected GPS sites. Relationship between Log Tp and Magnitude. Black line shows relationship for the base case with constant rupture properties. Red, blue and green values show shifts in the relationship due to changes in rupture properties. References: Hildyard, M.W., S. Nippress, and A. Rietbrock (2008), Event detection and phase picking using a time-domain estimate of predominate period Tpd, BSSA, 98 (6), 3025. Hildyard, M., and A. Rietbrock (2010), Tpd, a damped predominant period function with improvements for magnitude estimation, BSSA, 100 (2), 684. Conclusions: Clearly, variations in either rupture velocity or stress drop cause scatter (i.e. deviation from a straight line relationship to magnitude). and High initial slip does not lead to large initial period. The key observation though is that this same effect occurs on ALL stations and hence this type of scatter cannot be removed through the combination of multiple stations. An alternative strategy of removing effects of this scatter is needed. For full details read: Wright, T.J., Houlie, N., Hildyard, M., and Iwabuchi, I. (2012), Real-time, reliable magnitudes for large earthquakes from 1 Hz GPS precise point positioning: The 2011 Tohoku-Oki (Japan) earthquake, GRL 39 Conclusions: High initial slip does not lead to large initial period. The observations of determinism must have other causes and may indicate new mechanisms. TpMax in models is closely controlled by stopping phases.