Download
1 / 25
260 likes | 428 Views
Agent Based Modeling of Human and Natural Systems and their interactions. Authors : Armin R. Mikler ( mikler@cs.unt.edu ), Baird Callicott ( callicott@unt.edu ), Michael Monticino ( monticno@unt.edu ), Saqib Khalil ( khalil@cs.unt.edu )

E N D
Agent Based Modeling of Human and Natural Systems and their interactions Authors: Armin R. Mikler (mikler@cs.unt.edu), Baird Callicott (callicott@unt.edu), Michael Monticino (monticno@unt.edu), Saqib Khalil (khalil@cs.unt.edu) Presentation: Saqib Khalil (SwarmFest 2003, Notre Dame, IN) Research funded by Grant CNH BCS-0216722 from the National Science Foundation, Biocomplexity in the Environment (BE), Coupled Natural and Human Systems (CNHS) program. Network Research University of North Texas ~ 04.04.2003 Laboratory
Overview • This paper provides an overview of the simulation of interacting models that combine forest landscape dynamics with human values and decision making. • It also explores mathematically complex interaction and feedback relationships of integrated models. • We attempt to generalize results by applications of models to several hierarchical scales across scales and cultures. • We focus on the human systems side of this research. • We explore our choice of Agent Based Modeling for simulating human behavior. • We introduce Agent Based Modeling (ABM) and compare and contrast it with Equation Based Modeling (EBM). • Finally, we describe a toy model that serves as a prototype for the larger human system. Network Research University of North Texas ~ 04.04.2003 Laboratory
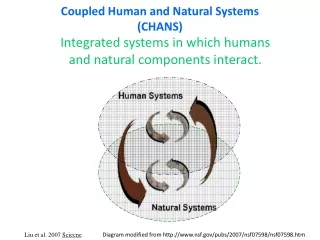
Understanding Biocomplexity • A new area of multi- and interdisciplinary scientific research focusing on the interactions of dynamic living systems. • Coupled Natural and Human Systems (CNHS) • Dynamic interactions between biotic communities, their associated ecosystems, and their human inhabitants. • Two major role players • Human beings and their natural environments. • Research seeks to understand important interactions between these two components. • The goal is to be able to predict effects of these interactions on both players. Network Research University of North Texas ~ 04.04.2003 Laboratory
The Goal of Coupled Natural and Human Systems Research • Build reliable computer models to understand and predict • the effects of human decisions on vegetation cover. • the effects of changed vegetation cover on ecosystem function. • the feedback looped effects of changed vegetation cover and ecosystem function on subsequent human decisions. • The simulation of these dynamics will be useful forEnvironmentalists, Geographers, Policy makers, etc. • It will enable them to anticipate the future environmental and social consequences and therefore to make better informed choices. Network Research University of North Texas ~ 04.04.2003 Laboratory
Our Approach • We model the anthropogenic disturbance and stressors with multi-agent simulation methods and utility functions. • In the figures below, • HS and NS stand for the human and natural systems. • I1 through I4 represent the different interfaces between the human and natural systems. Network Research University of North Texas ~ 04.04.2003 Laboratory
Our Approach (Cont.) Feedback Loop Agent Agent Agent Ui= f(x,y,z) HS NS I1 I2 I4 I3 Agent Agent Agent Uj= g(x,z) Network Research University of North Texas ~ 04.04.2003 Laboratory
Our Approach (Cont.) Feedback Loop Agent Agent Agent Ui= f(x,y,z) HS NS I1 I2 • Parameters • Parameters • Functions • Functions • Vectors • Vectors And/or Agent I4 I3 Agent Agent Agent Uj= g(x,z) Network Research University of North Texas ~ 04.04.2003 Laboratory
Modeling Coupled Natural and Human Systems • For modelingforest dynamics and ecosystem functions, we have chosen hydrological models (such as FACET and MOSAIC). • For modeling thehuman systems (that will be linked to both the land-cover and hydrological models), we have chosen to use agent based models (in particular, Swarm). Network Research University of North Texas ~ 04.04.2003 Laboratory
Equation Based Model (EBM): identifies system variables. evaluates or integrates sets of equations. Agent Based Model (ABM): A new approach to system modeling and simulation. An agent-based model is one in which the basic unit of activity is the agent. Usually a model will contain many agents (at least tens, occasionally many thousands) and its outcomes are determined by the interactions of the agents. EBM: for systems that can be modeled centrally (self-control). Example: ODE model of a supply chain at processes level. ABM: for domains characterized by a high degree of localization and distribution. Example: Urban Planning (STREETS Model). Supply chain with different components (Component Level). Agent Based Modeling vs. Equation Based Modeling Network Research University of North Texas ~ 04.04.2003 Laboratory
Agent Based Modeling vs. Equation Based Modeling (Cont.) • Integration of EBM analysis tools into ABM – A powerful way to study selection in systems with complex dynamics. • Example: Individual components (Agents) may be modeled through EBM. Network Research University of North Texas ~ 04.04.2003 Laboratory
Design/Implementation Cycle: Biocomplexity • Identify players. (Agent objects) • Extract actions. (Behavioral model) • Derive preferences and utilities. (Functional model) • Identify player interaction with environment. • Identify player interaction with players. ABM EBM ABM Network Research University of North Texas ~ 04.04.2003 Laboratory
Agents in context of ABM • Agents are any component in an ABM that have: • Internal data representations (memory or state). • Means for modifying their internal data representations (perceptions). • Means for modifying their environment (behaviors). PERCEPTIONS BEHAVIOR AGENT Network Research University of North Texas ~ 04.04.2003 Laboratory
ABM Implementation • Swarm: Swarm is a software package for multi-agent simulation of complex systems, originally developed at the Santa Fe Institute. • Swarm Features: • In the Swarm system the basic unit of simulation is theswarm, a collection of agents executing a schedule of actions. • Swarm supportshierarchical modeling approaches whereby agents can be composed of swarms of other agents in nested structures. • Swarm providesobject oriented libraries of reusable components for building models and analyzing, displaying, and controlling experiments on those models. Observer Swarm Model Swarm Collects Info. Creates Schedules OOP Data/Methods Network Research University of North Texas ~ 04.04.2003 Laboratory
Two agents:A1 & A2 A1 issues lumber cutting permits (government). A2 is a lumber company. Goals: A1 tries to control forest fragmentation as prescribed by the government guidelines and regulations. A2 tries to increase the number of permits so it can maximize it’s personal revenue. A Simple Scenario • Clearly, different agent types. • Conflicting Goals: • A1 tries to minimize and control forest fragmentation by issuing a limited number of permits. At the same time, it wants to maximize employment of the region for acquiring local support. • If A1 issues more permits, A2 can hire more people and consequently, there will be less unemployment but at the same time, there will be more forest fragmentation. Network Research University of North Texas ~ 04.04.2003 Laboratory
Players and Interaction HS NS government minimize fragmentation fragmentation Landscape Model Hydrological Model Agent1 minimize unemployment cutting permits Front stand Model GIS/RS Info Agent2 maximize employment $$$ invest cut trees Climate & Natural Disturbance Scenarios market sell trees Network Research University of North Texas ~ 04.04.2003 Laboratory
Landowners (An Abstract Model) A formal mathematical model in which we strive to depict an agent’s (landowner’s) actions. Actions Let, A (a1, a2, a3,…, an) represent the set of actions available to the landowner. For example, an individual can perform no action, protest individually, or organize into associations. A Mathematical Model Environment • Landowners are assumed to view the state of their vicinity (environment) by evaluating it with respect to a set of factors (F1, F2, F3,…, Fn). • For example, one factor is the intensity of residential development in the neighborhood. • Each factor is assumed to have a finite number of possible levels, represented by (f1, f2, f3,…, fn). • For example, high density development (several houses per acre), moderate density (golf course style developments), or low density (multi-acre residences). Network Research University of North Texas ~ 04.04.2003 Laboratory
Utility Function The preferences and value trade-offs of landowners for different states is expressed by a utility function. We employed a conjoint analysis survey method. These utility functions are dependent on Environmental state. Potential costs of taking a given action. Let, u (ai, f1,…, fn) denote the utility of an action-state pair. A Mathematical Model (Cont.) • If u (ai, f1,…, fn) > u (aj, g1,…,gn), then the landowner prefers action-state pair u (ai, f1,…, fn) over u (aj, g1,…,gn). Probability • Given a perceived threat to the environment (t), and a potential action (a) in response to that threat, a landowner constructs a probability measure, denoted by, p (t, a). • Final expected utility of an action: u (a | t) = {f1,….,fn}u (ai, f1,…, fn) * p (t, a) (f1, f2, f3,…, fn) • The action with the highest expected utility is selected by the landowner. Network Research University of North Texas ~ 04.04.2003 Laboratory
Assigning Preferences (Implementation) • The preferences and value trade-offs of an agent are usually represented by apreference structure. • In the introductory implementation, we create a preference structure for an agent. • Preference is a loosely defined concept, so to choose one behavior over others, a numerical utility function is usually defined. • Therandomness of the code allows for greater flexibility when creating preference structures for different agent types. Network Research University of North Texas ~ 04.04.2003 Laboratory
// AgentPreference.java // Inputs the preference structure of an agent import swarm.Globals; import swarm.defobj.Zone; import swarm.objectbase.SwarmObjectImpl; import java.io.*; import java.util.*; public class AgentPreference extends SwarmObjectImpl { // some variables private int totalElements; private int preferredElements; private Vector preferenceTable; // constructor public AgentPreference(int totalElements) { this.totalElements = totalElements; // randomizing the preferences preferredElements = 1 + (int) (Math.random() * totalElements); Assigning Preferences (Sample Code) Code Section 1 // giving weight to each element int totalWeight = 100; int eachWeight = totalWeight/preferredElements; //initializing the preferences preferenceTable = new Vector(); // PreferenceStructure class defined below PreferenceStructure ps; for(int i = 0; i<totalElements; i++) { ps = new PreferenceStructure(i, 0); preferenceTable.addElement(ps); } for(int i = 0; i <preferredElements; i++) { if(i == preferredElements-1) { ps = new PreferenceStructure(i, totalWeight); preferenceTable.set(i,ps); continue; } Network Research University of North Texas ~ 04.04.2003 Laboratory Code Section 1
// randomly adding weight to each element int thisWeight = 1 + (int) (Math.random() * eachWeight * 1.5); ps = new PreferenceStructure(i, thisWeight); preferenceTable.set(i,ps); totalWeight = totalWeight - thisWeight; eachWeight = totalWeight/(preferredElements - (i+1)); } } public String toString() { return totalElements + ":" + preferredElements + ":" + preferenceTable.toString(); } public Vector getPreferenceTable() { return preferenceTable; } } Assigning Preferences (Sample Code) (Cont.) Code Section 2 // class for storing the preferences class PreferenceStructure { private int elementNumber; private int preferenceValue; public PreferenceStructure(int elementNumber, int preferenceValue) { this.elementNumber = elementNumber; this.preferenceValue = preferenceValue; } public String toString() { return elementNumber + ":" + preferenceValue; } public int getPreferenceValue() { return preferenceValue; } } Network Research University of North Texas ~ 04.04.2003 Laboratory
Summary and Future Work • Agent Based Modeling allows researchers to investigate complex adaptive systems and allows them to create artificial worlds that model activity in the natural world. • In this paper, we have presented a toy model of how an agent makes decisions. • Our initial implementation includes assignment of preferences. • Currently, we consider one type of agent (landowner). In future, we plan to add more agent types. • We would like to thank all project participants for their valuable comments and feedback during preparation of this paper. Network Research University of North Texas ~ 04.04.2003 Laboratory
Cardelli, L., 1995, "A Language with Distributed Scope". Middleton, S. E., "Interface agents: A review of the field", Technical Report Number: ECSTR-IAM01-001, University of Southampton. Minar, N., Burkhart, R., Langton C., Askenazi M., 1996, "The Swarm Simulation System: A Toolkit for Building Multi-agent Simulations". Schelhorn, T., O'Sullivan, D., Haklay, M. and Thurstain-Goodwin, M., 1999, "STREETS: an agent-based pedestrian model". Langton, C., Ropella, G. Swarm Development Group. 2000. Felton, CA. (July 18, 2002); http://www.swarm.org. Jennings, N., Wooldridge, M., 1998. Agent Technology, Foundations, Applications, and Markets. Springer-Verlag Berlin Heidelberg. Johnson, P., Lancaster, A., 2000. Swarm User Guide. Swarm Development Group. Parunak, H., Savit, R., Riolo, R. Agent-Based Modeling vs. Equation-Based Modeling: A Case Study and Users' Guide. 1998. Proceedings of Workshop on Modeling Agent Based Systems (MABS98), Paris. References Network Research University of North Texas ~ 04.04.2003 Laboratory
Acevedo, M. F., Ablan, M., Urban, D. L., and Pamarti, S. 2001. Estimating parameters of forest patch transition models from gap models. Environmental Modeling and Software 16: 649-658. Acevedo, M. F., Urban, D. L., and Shugart, H. H. 1996. Models of Forest Dynamics based on roles of tree species. Ecological Modeling. 87/1-3:267-284. Acevedo, M. F., Pamarti, S., Ablan, M., Urban, D. L., and Mikler, A. 2001. Modeling forest landscapes: parameter estimation from gap models over heterogeneous terrain. Simulation 77:53-68. Acevedo, M. F., Urban, D. L., and Ablan, M. 1995. Transition and gap models of forest dynamics. Ecological Applications. 5(4):1040-1055. Anderson, J., 2002. An Agent-Based Event Driven Foraging Model. Natural Resource Modeling, Volume 15, Number 1. References Network Research University of North Texas ~ 04.04.2003 Laboratory
Contact • Saqib Khalil • khalil@cs.unt.edu • http://students.csci.unt.edu/~khalil • http://www.geog.unt.edu/biocomplexity Network Research University of North Texas ~ 04.04.2003 Laboratory
Q & A Network Research University of North Texas ~ 04.04.2003 Laboratory