Download
1 / 25
250 likes | 266 Views
Explore multiple wireless technologies for accurate indoor location detection, comparing algorithms and performance evaluation.

E N D
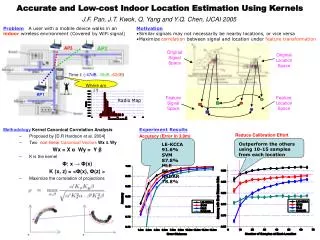
Indoor Location Estimation Using Multiple Wireless Technologies Dhruv Pandya, Imperial College {dhruv.pandya@doc.ic.ac.uk} Ravi Jain, Telcordia Technologies {rjain@acm.org} Emil Lupu, Imperial College {e.c.lupu@doc.ic.ac.uk}
Location-aware Computing • Proliferation of mobile devices + development of standard low-cost wireless networks e.g. Bluetooth • Richer application set • User customization • Example applications: E911: locating callers in emergencies, Call forwarding, Find nearest restaurant • Single-technology Approaches • Infrared transmissions: Active Badges, Want 92 • Time of Flight of Ultrasound: Cricket, Priyantha 2000 • Time of Flight of RF, Triangulation: GPS • RF, Scene Analysis: RADAR Dhruv Pandya
Current Limitations • Technology limitations e.g. GPS does not work indoors • Application restricted to sensor technology and its accuracy • System-dependent location representation Dhruv Pandya
Multiple Technologies • Devices with multiple wireless technologies • Application flexibility • Improved location accuracy • Location accuracy • Jain ICDE 2001 • Pandya June 2002, Masters’ Thesis • Similar approaches: • Geometric modelling: Leonhardt 1998 • Conflict resolution of multiple sources: Myllymaki 2002 Dhruv Pandya
Offline Samples • 49 physically distinct locations • 50 signal samples from each base station, in each of four directions • Run-time Samples • 6 locations per three, two and one base station coverage scenario • 50 samples from each base station while facing the North direction Static Scene Analysis – Data Collection 25.7m Corridor 32.2m • Signal Characteristics • 802.11: signal strength in dBm • Bluetooth: ‘link quality’ 802.11 Base Stations Offline location Run-time location Bluetooth Base Stations Dhruv Pandya
Runtime Offline Comparison Function Final location estimate Smallest Polygon A Corridor C B Dhruv Pandya
Runtime Offline Comparison Function Triangulation A Corridor C B Dhruv Pandya
Runtime Offline Comparison Function Final location estimate Nearest Neighbor A Corridor C B Dhruv Pandya
‘Fuse’ estimates Resolve estimates Comparison Basic Fusion Dhruv Pandya
Performance Evaluation • Distance Error • Average errors for locations with similar coverage scenario Dhruv Pandya
Comparison of Algorithms • Reduction in error with increased base stations • SP has best accuracy under three (1.8-2m) and one (4-5m) base station coverage Dhruv Pandya
802.11 Vs Bluetooth • Bluetooth performs better than 802.11 for all algorithms, except SP Dhruv Pandya
Basic Fusion • Basic Fusion performs better than TN (1.7-3.3m for three, 0.2-2.5m for two) and NN (0.5-2m for three, 0.4-2.3m for two) Dhruv Pandya
Fusion Vs Single-technologies • Bluetooth signal characteristic: Link Quality Dhruv Pandya
Summary • Location sensor technology restricts applications: Use multiple technologies • Experimental investigation into improving location accuracy by data fusion using Bluetooth and 802.11 wireless LAN • Differences to RADAR • Introduce spatial and temporal variability in runtime samples • Attempt to represent a more realistic situation • Single Technology • Smallest Polygon works best with 802.11 wireless LAN • Bluetooth works well with Triangulation and Nearest Neighbor • Multiple Technologies: • Increased base stations: accuracy increases 0.2-3.3m • Fusion improves accuracy over 802.11 (by 0.4-1.5m), but looses out over Bluetooth Dhruv Pandya
Further Work • Sophisticated single-technology and fusion algorithms • Improved location accuracy metrics • User A is 50% likely to be 2m radius of an estimateConfidence Precision Dhruv Pandya
Acknowledgement • Dhruv Pandya acknowledges travel funding support from EPSRC project GR/R95715/01 AEDUS: Adaptable Environments for Distributed Ubiquitous Systems Dhruv Pandya
Questions dhruv.pandya@doc.ic.ac.uk Dhruv Pandya
Single-technology Approaches • Infrared transmissions: Active Badges • Time of Flight analysis of Ultrasound: Cricket • Triangulation, RF: GPS • Scene Analysis, RF: RADAR Dhruv Pandya
Presentation Outline • Motivation • Related work • Data collection • Location Estimation and Fusion algorithms • Performance Evaluation • Conclusion Dhruv Pandya
Static Scene Analysis – Bracketing Location x y SS Base Station ID where r = Average of 50 Run-time SS samples, b = bracket value determined by the standard deviation of SS in our environment the location(s) that match the first possible SS in Q Dhruv Pandya
Smallest Polygon Dhruv Pandya
Triangulation Dhruv Pandya
Nearest Neighbour Dhruv Pandya
Standard Deviation of Algorithms Dhruv Pandya