Download
1 / 45
450 likes | 533 Views
Symbol Anchoring in a Grounded Layered Architecture with Integrated Reasoning. Stuart C. Shapiro Department of Computer Science and Engineering and Center for Cognitive Science University at Buffalo shapiro@cse.buffalo.edu. Based on.

E N D
Symbol Anchoring in aGrounded Layered Architecturewith Integrated Reasoning Stuart C. Shapiro Department of Computer Science and Engineering and Center for Cognitive Science University at Buffalo shapiro@cse.buffalo.edu S.C. Shapiro
Based on Stuart C. Shapiro & Haythem O. Ismail, “Anchoring in a grounded layered architecture with integrated reasoning,” Robotics and Autonomous Systems 43, 2-3 (May 2003) 97-108. S.C. Shapiro
Outline • Introduction • Perceivable entities and properties • Attentional Structures • Actions • Time • Language • Examples • Summary S.C. Shapiro
Definition “Anchoring is the problem of connecting, inside an artificial system, symbols and sensor data that refer to the same physical objects in the external world.” [Silvia Coradeschi & Alessandro Saffiotti] S.C. Shapiro
Embodied Cassie • A computational cognitive agent • Embodied in hardware • or Software-Simulated • Based on SNePS and GLAIR. S.C. Shapiro
Cassie, the FEVAHR(Foveal ExtraVehicular Activity Helper-Retriever) S.C. Shapiro
FEVAHR/Cassie in the Lab S.C. Shapiro
Crystal Cassie First Person Perspective Views S.C. Shapiro
Patofil and Filopatfrom “The Trial, The Trail” A VR drama by Josephine Anstey et al. S.C. Shapiro
DeliveryAgent Using Byron Weber Becker’s Java version of Rich Pattis’ Karel the Robot S.C. Shapiro
Magellan ProTM Mobile RobotfromiRobot S.C. Shapiro
SNePS • Knowledge Representation and Reasoning • Intensional Representation • Propositions as Terms • SNIP: SNePS Inference Package • Specialized connectives and quantifiers • SNeBR: SNePS Belief Revision • SNeRE: SNePS Rational Engine (Acting Language) • Interface Languages • SNePSUL: Lisp-Like • SNePSLOG: Logic-Like • GATN for Fragments of English. S.C. Shapiro
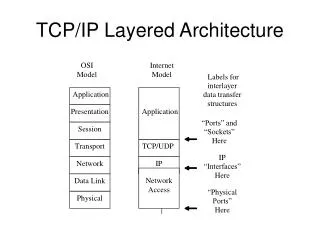
Interaction with Cassie (Current) Set of Beliefs [SNePS] English (Statement, Question, Command) Reasoning Clarification Dialogue Looking in World GATN Parser (Updated) Set of Beliefs [SNePS] (New Belief) [SNePS] Answer [SNIP] Actions [SNeRE] GATN Generator Reasoning English sentence expressing new belief answering question reporting actions S.C. Shapiro
Entities, Terms, Symbols, Objects • Cassie’s mental entity: a person named Stu • SNePS term: B4 • Object in world: S.C. Shapiro
GLAIR Architecture Grounded Layered Architecture with Integrated Reasoning Knowledge Level Mind SNePS Perceptuo-Motor Level IP Sockets B o d y NL Sensory-Actuator Level Vision Sonar World Proprioception Motion S.C. Shapiro
Alignment KL SNePS term PML structure Body (PML/SAL) World Object/Phenomenon Action S.C. Shapiro
Outline • Introduction • Perceivable entities and properties • Attentional Structures • Actions • Time • Language • Examples • Summary S.C. Shapiro
World Objectsto Feature Tuples PML/SAL World <Height, Width, Texture, . . . > S.C. Shapiro
Feature Tuplesto KL Terms KL PML/SAL ProperName(B4, Stu) <Height, Width, Texture, . . . > Alignment S.C. Shapiro
Incomplete PML-Descriptions KL PML/SAL Height(B4, B12) <Height, nil, nil, . . . > S.C. Shapiro
Unifying PML-Descriptions PML/SAL KL <x, nil, nil, ... > B20 <nil, y, nil, ... > B30 Prop Isa <nil, nil, z, ... > B31 Prop <x, y, z, ... > B6 S.C. Shapiro
Outline • Introduction • Perceivable entities and properties • Attentional Structures • Actions • Time • Language • Examples • Summary S.C. Shapiro
Deictic & Modality Registersfor being situated in the world KL Terms denoting PML Cassie Addressee Current time Current state(s) of looking at x . . . I You Now Vision . . . S.C. Shapiro
Outline • Introduction • Perceivable entities and properties • Attentional Structures • Actions • Time • Language • Examples • Summary S.C. Shapiro
Primitive Actions Alignedwith PML/SAL Functions KL PML SAL World Find(B4) M2(B4) <... > Modality Registers A KL symbol is a pivot coordinating different modalities. S.C. Shapiro
Outline • Introduction • Perceivable entities and properties • Attentional Structures • Actions • Time • Language • Examples • Summary S.C. Shapiro
Aligning NOW using MTF Maximal Temporal Frame based on *NOW KL PML NOW Semi-lattice of times, all of which contain *NOW, any of which could be meant by “now” Finite---only conceptualized times of conceptualized states S.C. Shapiro
Moving NOW with MTF KL NOW PML Moves when Cassie acts, newly observes a state, or is informed of a new state. Always includes times of states in modality registers. S.C. Shapiro
! duration time before after ! Providing a Feel for Time q t1 t2 KL PML hom COUNT n NOW 0 S.C. Shapiro
Outline • Introduction • Perceivable entities and properties • Attentional Structures • Actions • Time • Language • Examples • Summary S.C. Shapiro
Aligning Lexemes/NL KL PML/SAL World ProperName(B4, Stu) npr ctgy “Stu” Isa(B4, person) n ctgy “person” sing num Grammar NL S.C. Shapiro
Outline • Introduction • Perceivable entities and properties • Attentional Structures • Actions • Time • Language • Examples • Summary S.C. Shapiro
Acting 1 S.C. Shapiro
Acting 2 Follow a red robot. I found a red robot. I am looking at a red robot. S.C. Shapiro
Acting 3 Follow a red robot. I found a red robot. I am looking at a red robot. I went to a red robot. I am near a red robot. I am following a red robot. S.C. Shapiro
Use of Indexicals 1 Come here. I found you. I am looking at you. S.C. Shapiro
Use of Indexicals 2 Come here. I found you. I am looking at you. I came to you, Stu. I am near you. S.C. Shapiro
Use of Indexicals 3 Who am I? Your name is ‘Stu’ and you are a person. Who have you talked to? I am talking to you. Talk to Bill. I am talking to you, Bill. Come here. S.C. Shapiro
Use of Indexicals 4 Come here. I found you. I am looking at you. S.C. Shapiro
Use of Indexicals 5 Come here. I found you. I am looking at you. I came to you. I am near you. S.C. Shapiro
Use of Indexicals 6 Who am I? Your name is ‘Bill’ and you are a person. Who are you? I am the FEVAHR and my name is ‘Cassie’. Who have you talked to? I talked to Stu and I am talking to you. S.C. Shapiro
Outline • Introduction • Perceivable entities and properties • Attentional Structures • Actions • Time • Language • Examples • Summary S.C. Shapiro
Summary • KL terms denote mental entities. • KL terms aligned to PML structures. • PML variables/registers contain KL terms. • PML variables/registers/structures grounded in world via sensors & effectors. • PML attentional structures anchor symbols by changing only when motivated. S.C. Shapiro
Summary from Jackendoff Ray Jackendoff, Foundations of Language, Oxford University Press, 2002, Fig. 11.1, p. 348. (Independent work) S.C. Shapiro
For More Information • Personnel • Manual • Tutorial • Bibliography • ftp’able SNePS source code • etc. • http://www.cse.buffalo.edu/sneps/ S.C. Shapiro