Download
1 / 61
610 likes | 634 Views
This paper explores the innovative use of Cellular Automata (CA) for 3D morphing, offering a less restrictive and more natural process with minimal user control. The advantages and drawbacks of using volumetric data for morphing are discussed in detail, highlighting the benefits of this approach in fields like medicine and geology. The paper presents a design outline using CA, detailing the core increment algorithm and the step-wise process for filling both source and target volumes to generate smooth, organic transformations. Future work and conclusions are also outlined.

E N D
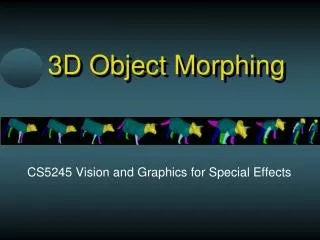
CELLULAR AUTOMATA FOR 3D MORPHING Sudhanshu K Semwal Kaushal S Chandrashekar Department of Computer Science University of Colorado at Colorado Springs
Outline Introduction to Morphing Background Design of volume morphing algorithms Implementation Results Future work Conclusions
Introduction to Morphing • Morphing • Given a source model S and a target model T, morphing constructs a series of transformations {Wt | t є[0,1]} such that W0 = S and W1 = T
Introduction to Morphing • Applications of morphing • Movies • 3D games • Study of evolution • Understanding fetal and plant growth
Introduction to Morphing • Types of morphing • 2 dimensional • 3 dimensional • Benefits of 3 dimensional morphing • Free from lighting and environmental considerations • Real-time camera view changes
Background • Types of 3D morphing • Polygonal mesh • Volumetric • Polygonal mesh morphing • Uses polygonal or polyhedral meshes as input • Mesh • Linear surface composed of polygons described as Vertex/Face/Edge/Graph or vertices • Describes topology of surface
Background contd • Benefits • Very popular format, supported by many modeling packages • Most approaches are of this form • Drawbacks • Datasets from medical and geological fields do not support polygonal data • Complex topologies difficult to handle, esp. with user control • Complex implementations reqd for processing and rendering
Background contd. • Two parts of the morphing problem • Correspondence problem • Interpolation problem
Background contd • Volumetric morphing • Uses 3 dimensional volumes as source and target • Volumes composed of voxels • Voxels – atomic unit of volume, short for volume pixel
Background contd • Volume defined as a collection of scattered voxels, with each voxel being associated with a set of values of size S, i.e, the volume V is given by: V = {(xi, vi ) | xi Є R3, vi Є RS, i = 1 .. n } [Chen1995] • Common representation is a 3 dimensional grid • Each (i,j,k) either empty or containing one value
Background contd • Benefits • Free of restrictions of topology and geometries • Can be easily be applied to meshes by converting them to volumetric data, while the reverse can result in topologies difficult to morph. • Data in the medical, geological and energy fields is generated in the volumetric format and needs to be morphed directly. • Do not need a bijective mapping between vertices of the source and target formats. • The simple format allows implementation ease.
Background contd. • Drawbacks • Not as popular as polygonal formats in the entertainment industry, fewer test models available. • Computationally intensive to process and render.
Background contd. • [Cohen-Or1998] Uses distance field transformation method • Uses user-defined control points • Morphing done using warping and cross-dissolving • Disadvantage – quality of morph dependent on control points
Background contd. • Problems with current 3D morphing techniques • Correspondence • Require user-defined control points • Exhibit TO
Background contd. • Our goal • Less restrictive approach • Minimal or no user control • Natural looking process
Background contd • Cellular Automata • Dynamic system composed of discrete cells, work in discrete steps of time and are characterized by local interactions • Some of the characteristics of CA are [Wolfram1984]: • They utilize a discrete lattice of sites • Discrete time steps drive the simulation. • Each site can only take a finite set of values • Each site evolves according to same deterministic rules • The evolution of a site only depends on the neighborhood.
Design contd • Characteristics of CA used • 3 dimensional lattice. • The dimension of the lattice is that of the volume. • Each cell can either be empty or contain one value. • All cells are equal • The cellular automaton is non-circular.
Design contd • Core increment algorithm • Source and target volumes overlaid within same CA • Uses intersection of 2 volumes as base • Intersection is called the core • Core incremented step-wise to fill both source and target volumes • At each iteration, each voxel in the core checks its surroundings, if source or target voxel found, adds that voxel to the core.
Design contd • Voxels required to start from core and fill both volumes recorded in add-array(target volume) and del-array (source volume) as separate sets. • Process continues until core cannot increment any more • Source model loaded into new volume • Add and del arrays scanned, former forward and latter in reverse • At each iteration, voxels for that iteration in the del-array are removed from the source volume and voxels for that iteration in the add-array are added • Source voxels not intersecting with target are gradually removed and target voxels are gradually added • Generates a smooth organic quality
Design contd • Benefits • Rules defining behavior of cellular automata are simple, hence easy to upgrade or replace. • Uses 3 dimensional arrays as volumes. Popular formats can be used directly. • No correspondence required between source and target models. • The morph can be controlled because of the add and delete arrays containing the information of each iteration as separate sets. • Organic quality of morph
Design contd • Disadvantages • Requires intersection of volumes • 4 volumes are reqd to be created, • Source, Target, Core, Source for morphing iteration • Volumes containing source and target have to be of same size, no restrictions on models themselves • No attempt to preserve mass • Color handling not solved, no solution elsewhere
Design contd • Bacterial growth model • Based on papers using CA for bacterial simulation • Bacteria modeled as individual agents in lattice and rules govern its reaction to environment and other bacteria • Each non-empty voxel in source volume is considered as a bacterium
Design contd • Rules for bacteria • Non-motile. • Homogenous • Have 2 needs, food and the need to reproduce, the latter being dependent on the former. • Will reproduce if it finds food and has space to place its offspring by making a copy of itself. • Creates only one offspring per iteration. • Will live and reproduce infinitely given enough space. • Will die if food is not present in its current position. • Cooperate to keep each other alive.
Design contd • Bacterial Growth Model • Each voxel in target considered inexhaustible source of food • Target volume overlaid in 3 dimensions over source • Effectively, food is provided to bacteria in source • For each position (i,j,k) in source, if (i,j,k) in target is non-empty, then (i,j,k) in source has food • Each bacterium in source checks to see if food present in current position
Design contd • If food found, and space available, reproduces with certain probability p1 • If food not found in current position, and not surrounded, dies with certain probability p2 • Bacteria in features that do not intersect with target starve and die, thus removing those features • Bacteria are encouraged to grow into features of the target volume, thus morphing into that shape
Design contd Probability of bacteria dying = 0.5 Probability of bacteria reproducing = 1.0
Design contd • Benefits • Extremely simple algorithm, easy to implement. • The source and target volumes need to be loaded only once and morphing can proceed. • No costly pre-processing steps required. • Ideal as a quick and dirty method of morphing, works well with models of similar sizes
Design contd • Disadvantages • Requires that input volumes be of same dimensions. No restriction on the sizes of the models themselves. • Computationally intensive because each voxel has to be considered. Can be alleviated to a certain extent by use of iso-surfaces of the source volume • Needs intersection of volumes to work. • No way to control the morphing process. • No support for handling color
Implementation • C++ used as implementation language • Visualization ToolKit used for rendering
Results • Test cases: a) Input.bin to Fuel.bin • 64 X 64 X 64 volume size • 17,000 non-empty voxels • Large extent of intersection b)Cube256x256x256.bin to aneurism.bin: • 256 x 256 x 256 sized datasets • 1.1 million non-empty voxels • Target dissipated through volume, branch like • Small amount of overlap
Results contd c)Cube256x256x256.bin to MRI-head.bin: • 256 x 256 x 256 sized datasets. • 7.1 million non-empty voxels • Source model overlaps and is smaller than target • Large number of voxel additions d) MRI-head.bin to bonsai.bin • 256 x 256 x 256 sized datasets. • 7.3 million non-empty voxels • Source model overlaps and is larger than target • Large number of voxel deletions
Results contd • Observations • Complexity is n3 where n is the size of one dimension of the source or target volume. • In normal cases, the amount of time taken for each iteration as well as the number of iterations depend on the size of the volume and the number of non-empty voxels within it.
Results contd • In case of test (b), the small amount of overlap leads to a large amount of additions and deletions. • The performance of this algorithm is better than the core increment method due to iso-surfacing • This algorithm seems to do well in cases where there is a large percentage of overlap between volumes • The quality of the morphs is in general worse than the core-increment algorithm
Results contd • Observations • The complexity of this algorithm is of the order of n3. • The time taken to morph increases linearly with the dimension of the volume. • There is no performance hit even when the overlap in test (b) is significantly lower than the others. • Tests suggest that the core increment algorithm is more stable with a varied type of source and target models than the bacterial growth models.
Results contd • Movies of Results
Future Work • Handling non-intersecting volumes • Multi-value volume support • Parallelization • Color handling • Scripting language support
Conclusion • Two algorithms for morphing volumetric data developed • Do not require any correspondence information • Do not require any user control. • Disparate models can be morphed • Applications • Entertainment • Medicine • Evolution, geology, education etc
Thank you Any Questions?
Introduction to Morphing • Desirable features of 3D morphing are: • Intermediate transitions should undergo continuous 3D transformations • Should apply to a variety of shapes and topologies • Should be able to use user input, but work well without it also
Background contd. • Current research • [Lee1999] simplify source and target meshes to form coarse base domains • Since base domains are simple meshes, easy to find correspondence • Allows user defined features
Background contd. • Current Research • [He1994] use Direct interpolation • For a function s(x,y,z) representing the source volume in 3D space and a function t(x,y,z) representing the target volume Ig(x,y,z) = (1 – g) s(x,y,z) + g t(x,y,z) , 0 <= g <= 1 where Ig is a function that represents the intermediate volumes. • Problems with high frequency components