Download
1 / 16
160 likes | 312 Views
User-Friendly Surveying Techniques for Location-Aware Systems. Both formerly at: Laboratory for Communication Engineering, University of Cambridge, UK. Fine-Grained Location Systems — Ready for End Users?. Systems with <25cm accuracy exist Ultrasonic, radio (UWB), vision

E N D
User-Friendly Surveying Techniques for Location-Aware Systems Both formerly at: Laboratory for Communication Engineering, University of Cambridge, UK
Fine-Grained Location Systems — Ready for End Users? • Systems with <25cm accuracy exist • Ultrasonic, radio (UWB), vision • Problem: many of these are deployed only in research labs • They require a PhD to install/maintain! • Developed for research, so this wasn’t an issue • Motivation: address [one of] the issues preventing deployment of fine-grained location systems for end-users.
Deployment = Installation + Configuration + Surveying • Installation: simplify using engineering tricks • Configuration: simplify using software tricks • Surveying = determining the location of the environmentally-placed components in the system. • Not so easy to automate.
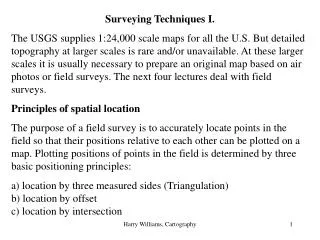
Current Surveying Techniques • Manual techniques: e.g. tape measure Very tedious Inaccurate over large distances Lots of chances for human error • Partly-automated techniques: e.g. theodolite Automate the measurement bit Potentially very accurate Still has large user and hardware requirements
Self-Surveying • The ability of a location system to gather survey data for itself • How is this possible? • Location systems determine location using data from a number of collected “sightings” • Many location systems collect surplus “sightings” at least some of the time • This surplus data can be used for surveying
Self-Surveying Framework • The framework for conducting self-surveying has 3 stages: • Data Gathering using the location system • Processing of the data to determine survey data • Combination of surveys from multiple rooms into a single coordinate space • This framework is applicable to a wide range of location systems • Various data-gathering, processing and combination techniques can be used
Data Gathering • “People” method • Gather data from people walking around with mobile units • Can be fully “transparent”: users behaving as normal • Each location sighting is independent so it’s hard to determine good ones for surveying • “Floor” method • Place mobile units on the floor of the room • Can cull bad readings • The height of the tags is identical, thus providing more “surplus data” for surveying • Less “transparent”
Data Gathering (cont.) • “Frame” method • Use a rigid frame to mount mobile units • Mobile units’ relative positions fully known, so more surveying data is gathered • Requires the use of extra hardware
Processing • Simulated Annealing • Model the locations of fixed and mobile units • Search for locations which best fit data gathered • Avoids local minima in solution space • Very general method, potentially applicable to many location systems/data-gathering methods • “Inverted” Location System Algorithm • For “frame” data, survey problem looks like an inverted version of normal location-finding problem • find fixed unit location using known mobile unit locations • Can use location system’s own algorithm • Algorithm is optimised for location system
Combination of Survey Data • Data gathered from multiple rooms must be combined to form a single large survey • Can be done at pre-processing or post-processing stage, depending on the data-gathering method.
Experimental Results Values are 90th percentile errors in centimetres • Frame method gives accuracy comparable with accuracy of underlying location system (Bats). • But every technique is useful, depending on app • Tradeoff between effort and accuracy • Can always resurvey
Results: Plan View of Room • Plan view shows that errors are higher at sides of room • Due to fewer mobile units at edge of room (lower “PDOP”) • Implications for data-gathering: bias survey towards edges
Conclusions and Broader Picture • Self-surveying shown to be viable • Can facilitate rollout of location systems to end users • The framework and methods presented are likely relevant to other location systems • Related problem: surveying of environment (e.g. walls, furniture) and of important objects (computers, phones) • c.f. Rob Harle’s work at UbiComp 2003