Download
1 / 20
200 likes | 370 Views
What is Computational Geometry. Ref: Godfried T. Toussaint. Given a line (y= a x+ b ) and a point p (x p ,y p ), determine whether the point is above/below the line. The Problem. Solution 1: Set x z = x p Compute y z Compare y z and y p. Signed area: Negative if CW Positive if CCW

E N D
What is Computational Geometry Ref: Godfried T. Toussaint
Given a line (y=ax+b) and a point p (xp,yp), determine whether the point is above/below the line The Problem • Solution 1: • Set xz= xp • Compute yz • Compare yz and yp
Signed area: Negative if CW Positive if CCW How do you compare these two algorithms in terms of: Robustness? Efficiency? Origin of this formula Alternate Solutions Consider special cases …
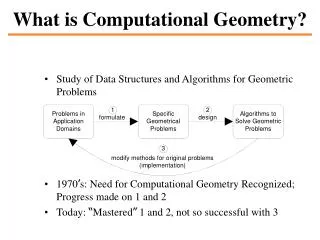
Possible Definitions of CGeom • The science concerned with computing geometric properties of sets of geometric objects in space • The design and analysis of algorithms for solving geometric problems • The study of the inherent computational complexity of geometric problems under varying models of computation • Runs faster, requires less memory space and more robust wrt numerical errors
Modern Computational Geometry • Ph.D. thesis of M. Shamos (Yale, 1978) • Has been around for more than 2600 years starting with the Greeks • Difference: • The size of input to an algorithm (n) • (Today) Hundreds, thousands, or millions • The dimension of a problem (d) • (Greek) Euclidean two and three space • (Today) not limited to the exploration of low dimensional problems; non-Euclidean, higher dimension
Ex: Convex Hull (naïve algorithm) C(n): the total number of primitive operation required The Complexity of Algorithm
Big O, Big Omega • Big O: • A simplified expression with only the dominant terms, dropping the coefficient • The contribution that Shamos made was the emphasis on including with each algorithm a complexity analysis in terms of “Big O” notation and the introduction of lower bounds on the complexity of geometric problems • Big Omega W: • Lower bound on the time complexity of the problem • A statement about the problem (not the algorithm) • Optimal: when complexity function of the algorithm matches the complexity function of the problem
Geometric Probing Art Gallery Theorems and Algorithms Computer Graphics Geometric Modeling Computer Vision Robotics Dynamic CG Parallel CG Isothetic CG Numerical CG Geodesic CG See also: Eppstein’s Geometry in Action The Domain of CG
Determine location X where a facility should be located so as to minimize the distance from X to its furthest customer Find the smallest circle that encloses a given set of n points [reference] Ex: Minimax Facility Location Problem
Implement a QC procedure to determine circularity of rings For smooth convex shape, the verification of D in sufficient directions should work Apply 3 probes, 60 degrees apart Does this work? [Challenger anecdote] Ex: Geometric Probing
Reuleaux triangle (construction) Known as constant diameter shape Smooth rolling, yet highly non-circular Demonstrates that any number of such probes is insufficient to determine circularity Geometric Probing (cont) Verify the distance between any parallel lines is D
The determination of the number of probes that are necessary and sufficient to determine an object completely The design of efficient algorithms for actually carrying out the probing strategies Computer vision, pattern recognition, QC, robotics References: Steven Skiena: Problems in Geometric Probing. Algorithmica 4(4): 599-605 (1989) Skiena: Interactive Reconstruction via Geometric Probing (1992) Theory of Geometric Probing
Ex:Art Gallery Problem • 1973 Victor Klee poses the problem • Given n arbitrarily shaped gallery, what is the minimum number of cameras required to guard the interior of an n-wall gallery? • 1975, Vasek Chvatal’s theorem: n/3 are always sufficient and sometimes necessary.
Computer Graphics • Hidden line problem; hidden surface removal; visibility problem
Isothetic Computational Geometry • Also rectilinear computational geometry • Often greatly simplifies the algorithm • Image processing, VLSI design
Geodesic • Euclidean distance between two points no longer a useful measure • Geodesic distance: the length of the shortest path between the two points that avoids obstacles • Geodesic convex hull (also relative convex hull): • Given a set S of n points inside a simple polygon P of n vertices, the relative convex hull of X (relative to P) is the minimum perimeter circuit that lies in p and encloses S.
Homework • Verify that the signed area of triangle is correct. • Verify that for Reuleaux triangles, the distance between any pair parallel lines is constant.
r q p