Download
1 / 13
130 likes | 346 Views
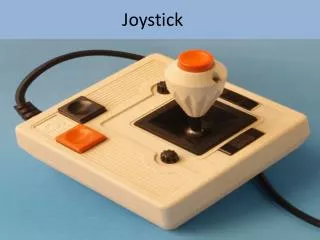
Joystick-Kamera Med PIC16F690. Projektarbete Med PIC-processorer Kursen: Tillämpad digital teknik med PIC-processorer 7.5HP (IL131v) KTH. Huvudkomponenter i projektet. Joysticken. Joystick utslag för olika versioner. Kontinuerlig version. Servo version.

E N D
Joystick-Kamera Med PIC16F690 Projektarbete Med PIC-processorer Kursen: Tillämpad digital teknik med PIC-processorer 7.5HP (IL131v) KTH
Joystick utslag för olika versioner Kontinuerlig version Servo version • Ju mer utslag på Joysticken desto kortare tid mellan utställningen av motorn spolar • Ju större differensen är mellan nedre gräns om AD omvandlaren desto fler antal utställningar av motorn
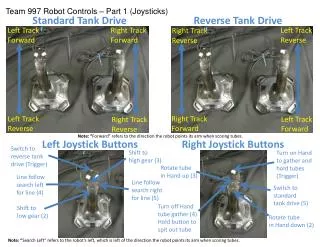
Lägen och Dioder Lägen för Kontinuerlig-version Lägen för Servo-version • När Joysticken är i mitten-läget så Lyser en grön diod • Om Joysticken förs i sidled (höger eller vänster) så ändras grön diod till Blå diod. • När Joysticken är i mitten-läget så Lyser en grön diod • Om Joysticken förs i Sidled så ändras dioden till röd • När först när motorn är färdig och joysticken är tillbaka i mitt läge så slår dioden om till grön
Knapp/Givare Knapp på Joystick Givare på kugghjul • Startar lysdioder på kameran • (Alternativ) Tutar med en summer • Givaren säger till när ”servon” har kommit tillbaka till ursprungsläget.
Kort om stegmotorer Modeller av stegmotor Bipolära Unipolära Skiftning av motorns spolar 1100 0110 0011 1001 Lätt att sätt att göra detta för PIC-processorer Pin_state=0b1100; Pin_state=rl(Pin_state); PORTC= Pin_state: Delay(4);
Drivkretsar för stegmotorer L293D L293B • 4- ingångar • 4-utgångar (Max 0.6A) • Separat matning • Inbyggd D-brygga • Möjlighet till enable • 4- ingångar • 4-utgångar (Max 1A) • Separat matning • Saknar inbygg D-brygga • Möjlighet till enable