Download
1 / 24
250 likes | 351 Views
Advisor: Professor Neal Anderson Michael Baccari Peter Bian Michael Coughlin Avi Noy. Irregular Object Dimensioning System. Agenda. Background MDR Specification Progress Report Challenges Future Plans Summary. Background. Sorting facilities’ conveyer belts.

E N D
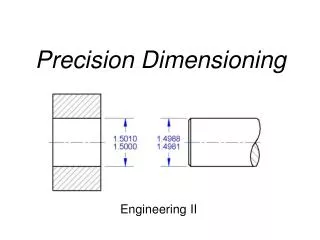
Advisor: Professor Neal Anderson Michael Baccari Peter Bian Michael Coughlin Avi Noy Irregular Object Dimensioning System
Agenda • Background • MDR Specification • Progress Report • Challenges • Future Plans • Summary
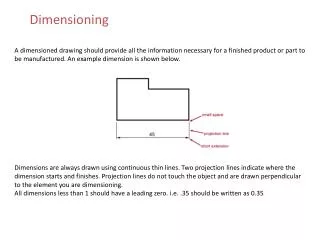
Background • Sorting facilities’ conveyer belts. • Components of sort system: Photo eye, laser measuring heads, set of 6 line-scan cameras.
Background (Cont’d) • Irregularly shaped objects • Current issues with the dimensioning component. • “The irregular approval.”
Background (Cont’d) • Dimensions used for storage area on cargo planes • Minimize cuboidal volume of irregularly shaped objects • Increases profits • Save cargo space • “Irregular Approval” • Guideline test for major shipping companies • Half inch margin error • “Sputnik” test
MDR Specification • Software Progress • Demo of algorithms for dimensional reconstruction from simulated laser data input • Demo of image processing algorithm with basic edge detection from camera • Working Hardware Components • Conveyor Belt • 2 laser measuring heads (LMS 200) • 2 Cameras • LED Light Sources • Photo Eye • Research • Multiplexing • Image Processing • Depth Maps • Quantifiable Requirement Specifications • Irregular Approval • Proposed System Improvement
Progress Report (Cont’d) • Hardware Components • LMS – Laser Measuring Heads • One 2-D camera • Two LEDs • Photoeye • Conveyor belt
Progress Report (Cont’d) • LMS Setup
Progress Report (Cont’d) • LMS Initialization
Progress Report (Cont’d) • 2-D Camera
Progress Report (Cont’d) • LEDs
Progress Report (Cont’d) • Photoeye
Progress Report (Cont’d) • Photoeye (Cont’d) • IR Led transmitter – Hamamatsu part #L2690-02 • Forward current IF = 50mA • R = VCC/IF = 5/50mA = 100Ω • Digital output photo IC – Hamamatsu part #L6289 • Photodiode • Schmitt trigger circuit • Output resistor • RL = 1.2kΩ • Ccoupling = 0.01uF
Progress Report (Cont’d) • Photoeye – Results
Progress Report (Cont’d) • Conveyer belt demo video
Progress Report (Cont’d) • Image processing algorithm • SUSAN (Smallest Univalue Segment assimilating Nucleus) Principle
Progress Report (Cont’d) • Image processing algorithm demo
Progress Report (Cont’d) • Laser edge detection and dimensional algorithm
Challenges • Blind spots
Challenges (Cont’d) • Current algorithm • 2 dimensional axis • No algorithm for 3 dimensional axis • All edges and protrusions mapped out for irregular object • Multiplexing cameras with LMS heads
Future Plans • Creation of 3 dimensional axis algorithm • Implementation • Multiplexing of two sets of data • Execution of new dimensioning algorithm • Possible improvement of edge detection for LMS and cameras • Construction of redesigned control box
Summary • MDR Specification • Improve accuracy of dimensioning of irregularly shaped objects • “Irregular Approval” • Half inch margin of error