Download
1 / 37
370 likes | 393 Views
Understand and enhance multiple object shapes in images through processing techniques like thresholding, masking, and morphology operations. Learn to count objects and analyze their connectivity in binary images efficiently. Explore grassfire transform for distance measurements.

E N D
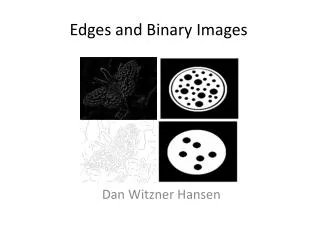
Binary Images • Each pixel is 0 or 1, background or foreground • Image processing to • Enhance separation of objects of interest • Separate and count multiple objects • Understand the shapes of multiple objects
From image to binary image • Classification: dividing pixels into "foreground" and "background" • Thresholding • If a pixel has a value in range (min, max) it is foreground • Often min is 0 or max is maximum pixel value • Choice of range can be manual or automatic • (E.g. look for peaks / valleys in histogram) • More complex operations • Use information from neighboring pixels • Use properties besides pixel value (e.g. location) • …
N W E S Image Neighborhoods • Neighborhoods can be defined for each pixel • The two most common neighborhoods • 4-neighborhood • 8-neighborhood
Applying a Mask • Mask is a set of relative pixel positions. One is designated the origin (0,0) - usually at center • Each mask element is weighted • To apply the mask, put the origin pixel over the image pixel and multiply weights by the pixels under them, then add up all the values. • Usually this is repeated for every image in the pixel. Assumptions must be made for pixels near the edge of the image.
Mask application example • Result is 0 0 0 1 1 0 0 1 2 2 0 1 2 3 2 1 2 3 3 2 2 3 3 3 2 • Mask = 1 1 1, origin at center • Apply to every pixel in image: 0 0 0 0 1 0 0 0 1 1 0 0 1 1 1 0 1 1 1 1 1 1 1 1 1
Masks for object counting • External corners (origin = top left) 0 0 0 0 1 0 0 1 0 1 1 0 0 0 0 0 • Internal corners (origin = top left) 1 1 1 1 1 0 0 1 1 0 0 1 1 1 1 1 • Apply using exact match (result is 1 if every pixel in mask matches the image) • If any of the 4 external corner masks matches, the corner is external (& same for internal)
Counting 4-Connected Objects • The number of 4-connected objects in an image is (E - I) / 4 where E is the number of external corners and I is the number of internal corners. • Assumptions: • Objects are 4-connected (2 diagonal pixels are 2 objects) • Objects do not contain "holes" within them
Connected Components • "Blobs" are connected components • 4-connected (diagonal neighbors don't count) • 8-connected (diagonal neighbors are connected) • The following diagram has 3 4-connected components (red, blue, black) or 2 8-connected components (non-black, black)
Recursive Connected Components • Copy the image • While at least one 1-pixel exists in the existing image • Create a new label • REC_LABEL(label, pixel) • REC_LABEL(label, pixel) • Label and remove the pixel • For each non-zero neighbor • REC_LABEL(label, neighbor)
Recursive Connected Components Example First pixel After 4 recursive calls, no 4-neighbors neighbors to color Start again with a new color on an unmarked pixel
Two-Pass Connected Components • Pass 1 • For every pixel in the image (left-right, top-bottom) • If the pixel is non-zero • If the pixel has no labeled neighbors (above/left) • Create a new label & label it • Else if all labeled neighbors are the same • Give the pixel the same label • Else if neighbors have 2 different labels • Give the pixel the largest label • Mark the smaller label as a parent of the larger one (parent [larger] = smaller)
Two-Pass Connected Components • Pass 2 • Renumber all pixels using only one value for each "equivalence class" • This value is the root of the tree While (parent[x] != 0) x = parent[x];
Two-pass Connected Component Example 2 lines scanned 3 lines scanned 4th line -- Conflict - set black = blue ?
Binary Image Morphology • Morphology = "Study of Shape" • Set of operations that are useful for processing connected components ("blobs") based on shape • Examples • Remove small holes or outcroppings • Remove objects below a given size • Smooth corners
Structuring Element • Mask used for binary morphology • Like convolution masks, they slide over the image and operate on the pixels under them • Common elements: • Box (square or rectangle) • Disk (digital filled circle) • Bar (horizontal or vertical)
Morphology Operations • Dilation • Result is mask OR original • Erosion • Result pixel is 1 if origin pixel is 1 and all pixels covered by the mask are also 1
Morphology Operations • Closing = dilation followed by erosion • Opening = erosion followed by dilation
Applications of Morphology • General • Closing closes holes (up to size of element) • Opening opens spaces (up to size of element) • Specialized • Choose elements of size/shape based on your object • Eliminate objects that are too small / large • Isolate interesting features
Grassfire Transform • Each pixel is distance to closest “1” in the original image.
Two-Pass Algorithm for Grassfire • Set all boundary pixels to Max • First pass: top left to bottom right • If original pixel was 1, pixel is 0 • Else pixel = min(above + 1, left + 1); • Second pass: bottom right to top left • Pixel = min(pixel, below+1,right+1);
Distance Transforms and Medial Axis • Grassfire as described here measures 4-connected distance to the region of interest • Variations • Use a different distance transform, e.g. Euclidean • Use 0 instead of a large value at the boundaries • Medial axis is set of points furthest from a boundary • Set of pixels with maximal values in grassfire • Very sensitive to changes in boundary
Examples • Figure 3.9 (f = dilated, g=grassfire, h=components)
Other Useful Binary Image Operations • Pixelwise AND, OR • Pixelwise Subtraction • 0 if first image is 0, or both images are 1 • Translation • Every pixel is copied (dx, dy) away from its original position
Shape Representation • Shape = list of features • Boundary points, segments • Region features (center, convex hull, etc.) • “Interesting” points, e.g. corners • Shape invariants • Shape = mathematical description • Function type & parameters (e.g. circle, radius 5, centered at (0,0)) • Mathematical function approximation of boundary, e.g. B-spline • Shape Classes
Shape Features • Region features • Simple properties (area, Euler’s #, projections, bounding box, eccentricity, elongatedness, direction, compactness) • Statistical moments • Convex Hull • Region decompositions (hierarchical representation) • Skeleton • Boundary features • Boundary points (e.g. chain code) • Geometric properties (perimeter, curvature, chords, etc.)
Simple Properties • Area • Number of pixels in the region • Perimeter • Number of boundary pixels • Compactness = (Perimeter & Perimeter) / Area • Maximal for circle, minimal for thin, long rectangle • Centroid • Average x value, average y value
Statistical Moments • In a binary image, a moment is the sum of relevant x’s and y’s. • (0,0) moment = area • (1,0) moment / area = average x coordinate • (0,1) moment / area = average y coordinate
Variations on Statistical Moments • Central moment • First translate the shape so that its center is (0,0), i.e. subtract the (average x, average y) values from all pixel locations • Scaled central moment • Divide the central moment by a power of the scale factor and the area • Unscaled central moment • Divide the central moment by a power of the area only
2nd Order Moments and Ellipses • Central (2,0) moment relates to the horizontal axis of an ellipse approximating the shape • Central (0, 2) moment relates to the vertical axis of an ellipse approximating the shape • Central (1,1) moment relates to the rotation of an ellipse approximating the shape
More Region Properties • Bounding box • Min, max x-value, min-max y-value • Extremal points (on the bounding box) • Topmost left, topmost right, leftmost top, leftmost bottom, etc. • Lengths of extremal axes (e.g. top left -> bottom right) • These approximate the Convex Hull of the object • Convex hull is the shape you get by pounding nails into the black pixels and then wrapping them with a rubber band.
Boundary Pixels and Perimeter • 4-connected object (black) • Boundary pixels have at least one white 8-neighbor • 8-connected object (black) • Boundary pixels have at least one white 4-neighbor • If the object is 4-connected, the background is 8-connected and vice versa • Perimeter is the number of boundary pixels • Chain code: start at uppermost, leftmost boundary pixel - list DIRECTION to next pixel until the first one is reached again
Where is the center? • Centroid, center of mass (average x over all pixels, average y over all pixels) • Center of contour (average x, y over boundary pixels only) Example (note sensitivity to contour!)
Region Skeletons • Basis: thinning (many algorithms!) • Maximum values of grassfire transform (medial axis) • Last pixels to disappear with repeated erosion
Hierarchical or Graph Shape Description • Define a set of primitive shapes • Define a set of operations (concatenation, union, intersection, etc.) • Define a shape as a network of primitive shapes (parts) connected by operations • Recognize a shape by recognizing its parts and the relationships between them.
Region Adjacency Graph • Primitive shape = "connected set of pixels" • Operations = "adjacent to" • Element of region 1 is in the neighborhood of element of region 2 • In binary images, all regions with no holes are adjacent to the single background region • All holes are adjacent to the objects that contain them