Download

1 / 9
90 likes | 106 Views
This demo showcases a system designed to locate an evader in a sensor network, transport their data out of the network, and use the evader's information for real-time control. The system includes a sensor network, an autonomous pursuer, and various data processing components. Join our demo team as they demonstrate the capabilities of this distributed control system.

E N D
NEST Demo: Distributed Control Or, Catch the Bad Guy 1
System Requirements • Locate an evader in a sensor network • Transport evader data out of network • Use evader information for real-time control • Tracking system • Autonomous pursuer • Demo Team: Jason Hill, Philip Levis, Kamin Whitehouse, Sarah Bergbreiter,Bruno Sinopoli, Luca Schenato, Shawn Schaffert 2
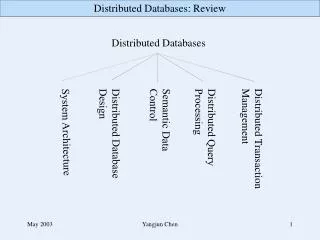
System Architecture Sensor Network Tracker Evader Pursuer Data Processing 3
Sensing • Magnetometer • Evader (adversary) • Delta, steady, drift • Jason • Sounder / tone detector • Pursuer (cooperative) • Time of flight / ranging • Kamin 4
Local Data Aggregation, Transport • Local advertisement of readings • Local data aggregation • Group leader selection • Link-level acknowledgements • Geographic routes • Rotating parent selection • Jason 5
Data Processing • Evader path estimation from magnetometer • Luca • Pursuer position estimation from sounder • Kamin 6
Tracker • Calibrate to regular mote grid • Transform sensor readings to camera coordinate space • Actuate camera • Using PC: Shawn and Luca • Using mote: Phil 7
Pursuer • Given estimated position data, catch evader • Limited robotic control (simple car) • Interfacing TinyOS to robot hardware • Sarah and Bruno • Incomplete 8
Coming up next… • In-depth presentations on individual pieces of system 9