Download
1 / 32
370 likes | 720 Views
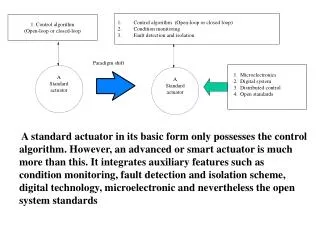
An Introduction to Electrostatic Actuator a Device Overview and a Specific Applications. Prepared By: Eng. Ashraf Al-Shalalfeh Mechanical Engineering Dept. Faculty Of Engineering & Tech. University Of Jordan. What Is The MEMS ?. It stands for: Micro-Electro-Mechanical Systems.

E N D
An Introduction to Electrostatic Actuator a DeviceOverview and a Specific Applications Prepared By: Eng. Ashraf Al-Shalalfeh Mechanical Engineering Dept. Faculty Of Engineering & Tech. University Of Jordan
What Is The MEMS ? • It stands for: Micro-Electro-Mechanical Systems. • It is an integration of elements, sensors, actuators, and electronics on a common silicon substrate. • Micro-fabrication technology, for making microscopic devices.
What Is The Actuator ? • The actuator is an element which applies a force to some object through a distance Various actuation mechanisms: • Electrostatic actuation • Thermal actuation • Piezoelectric actuation • Magnetic actuation
Electrostatic Actuation: • A voltage is applied between metal plates to induce opposite charges and Coulomb attraction
Electrostatic Energy & Force: Electrostatic Energy : Electrostatic Force : • Coulomb’s Law: Force between two point charges
Electrostatic Actuators Types: Force Normal to Plate : Force Parallel to Plate
Why Comb Drive Micro Actuator ? Force doesn’t drops rapidly when increasing gap
Electrostatic Actuation Mechanism: • Electrostic Micro-actuator consists of many fingers that are actuated by applying a voltage. • The thickness of the fingers is small in comparison to their lengths and widths. • The attractive forces are mainly due to the fringing fields rather than the parallel plate fields. Fringing Curves
Comb Drive Micro Actuator Parts: Moving Comb Folded Beam (Movable Comb Suspension) Ground Plate Stationary Comb Anchors
Comb Drive Micro Actuator Video: Sorry Video is too big to upload to net…
Electrostatic actuators Advantages: • Low power dissipation. • Can be designed to dissipate no power while exerting a force. • High power density at micro scale. • Easy to fabricate.
Challenges for Actuators • Scaling • Noise & Efficiency • Range of force, motion and frequency • Repeatability • Nonlinearity
Small deflection Model Description large deflection
ANALYSIS: 1-D motion of the device can be described by the following equation: Where: x: is displacement. m: is mass. c: is damping.
Considering nonlinearity, the recovery force can be expressed as: Where: k1: linear stiffness. k3:cubic stiffness. When voltage signal being applied on comb drive fingers, Fe is:
Substituting Fe and Fr in equation (1) : the equation can be rewritten as a harmonic oscillator with normalizing:
The harmonic component whose frequency is • is called an order sub-harmonic Case Study target ? Sub-Harmonic Resonance, Its Stability, BifurcationAnd Transition to chaos • What is the sub-harmonic resonance? • Why the 1/3 sub-harmonic resonance? • A dynamic system operating at high rotational speed may undergo a sub-critical loss of stability which leads to violent and destruction sub-harmonic vibrations.
Solution Approaches: 1. Method Of Multiple Scales (MMS) 2. 2 Mode Harmonic Balance Method (2MHB) 3.Chaos Diagnostic Tools: • Phase Plane Plot • Poincare’ Maps • Frequency Spectrum
Method Of Multiple Scales (MMS) • Why the (MMS)? The Method Of Multiple Scales (MMS), is one of the most commonly used procedure for analyzing various resonances in nonlinear systems. Where fast and slow time scales are defined respectively by:
a detuning parameter is giveby: In terms of these time scales, the time derivatives become : Where; assumes a power series expansion for the dependent variablex :
Harmonic Balance Method (2MHB) A two modes harmonic approximation to the steady state 1/3 sub-harmonic resonance response of the above oscillator takes the form: