Download
1 / 12
130 likes | 319 Views
Chaotic Invariants for Human Action Recognition. Ali, Basharat , & Shah, ICCV 2007. Premise: Moving reference joints carry information about human actions. Assumption: Human actions are generated by a nonlinear dynamical system. Dynamical: the system’s behaviour changes over time

E N D
Chaotic Invariants for Human Action Recognition Ali, Basharat, & Shah, ICCV 2007
Premise: Moving reference joints carry information about human actions
Assumption: Human actions are generated by a nonlinear dynamical system • Dynamical: the system’s behaviour changes over time • Nonlinear: the rule(s) describing this change cannot be written as a linear function • How to capture the nonlinear physics of human actions?
Assumption: Human actions are generated by a nonlinear dynamical system • Movement trajectories of reference joints only provide a low-dimensional observation of the human action system • But, they still carry information about the entire (nonlinear) system
Approach: Chaotic Invariants • Reconstruct the dynamical behaviour of the human action system based on movement trajectories of reference joints • delay-embedding theorem (Takens, 1981) • Characterize this reconstructed dynamical behaviour with chaotic invariants • Action recognition based on chaotic invariants
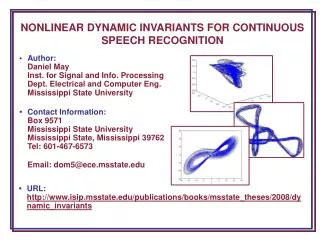
Example of application of delay-embedding theorem: • Lorenz system:
Example of application of delay-embedding theorem: strange attractor: • Lorenz system: • plotting x, x - delay, x -2*delay
Appl. of delay-embedding theorem to movements of reference joints:
Characterisation of strange attractor with chaotic invariants • Maximum lyapunov exponent:Quantifies the divergence of the strange attractor • Correlation integral:Quantifies the density of points in the phase space (using a threshold for nearby points) • Correlation dimension:Quantifies the sensitivity of the correlation integral for the applied threshold
Results of activity classification using chaotic invariants: