Download
1 / 19
190 likes | 208 Views
Exploring motion fields from local to global scales, including recovery of 3D structures from motion, luminance ratios, and edge perception in visual processing. Key concepts from Hildreth (1985) to Ullman's model. Open questions on rigidity assumption and non-rigid objects.

E N D
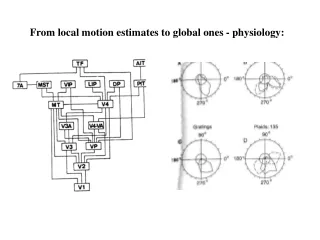
Motion fields for more complex patterns: Hildreth (1985): Smoothness of velocity field along the contour True motion field Local motion estimates Smoothest Velocity field
Motion fields for more complex patterns (contd.): Ellipse demo
Recovering 3D structure from motion: Kinetic Depth Effect [Wallach, 1953] Another possible percept Percept Inference: The human visual system has a preference for rigid interpretations
Ullman’s model for recovering 3D structure from motion: • Establish correspondence between features in different frames • Recover transformation matrix and z values of points Key result: For a rigid structure, 4 non-coplanar points in 3 frames are sufficient to solve for all the unknowns [Ullman, 1979] Open questions: 1. Do these bounds apply to human observers too? 2. Does the rigidity assumption always hold? 3. How do we recover the 3D structure of non-rigid dynamic objects? Video 1: NR rotating object Video 2: Johansson
Processing Framework Proposed by Marr Recognition 3D structure; motion characteristics; surface properties Shape From stereo Motion flow Shape From motion Color estimation Shape From contour Shape From shading Shape From texture Edge extraction Image
Color Estimation: Goal: To recover the intrinsic surface reflectance of an object. And yet, we have good lightness constancy!
Lightness Constancy: The constancy in perceived surface reflectance regardless of differences in illumination. Luminance (L) = Reflectance (R) * Illumination (I) Goal: Given L, recover R. Clearly underconstrained. Assumptions are needed for unique solutions. Helmholtz’s theory: Observer ‘knows’ I through past experience. Hering, Wallach, Land & McCann: Observer computes luminance ratios across edges. (some important hidden assumptions here) Explain fig above
The perceptual importance of luminance ratios at edges: Cornsweet Illusion
TANGENT ALERT! Are ratios taken with actual or perceived luminances?
Land and McCann’s Retinex theory: I * R L Given L, recover R
Land and McCann’s Retinex theory - Assumptions: • The world is flat and all sharp • luminance variations are due • to changes in reflectance. • Reflectance always changes • abruptly. • Illumination changes gradually • across a scene. Basic idea: Preserve luminance ratios at edges and discard slow variations.