Download
1 / 23
290 likes | 855 Views
TRIGONOMETRY. http://math.la.asu.edu/~tdalesan/mat170/TRIGONOMETRY.ppt. Angles, Arc length, Conversions. Angle measured in standard position. Initial side is the positive x – axis which is fixed. Terminal side is the ray in quadrant II, which is free

E N D
TRIGONOMETRY http://math.la.asu.edu/~tdalesan/mat170/TRIGONOMETRY.ppt
Angles, Arc length, Conversions Angle measured in standard position. Initial side is the positive x – axis which is fixed. Terminal side is the ray in quadrant II, which is free to rotate about the origin. Counterclockwise rotation is positive, clockwise rotation is negative. Coterminal Angles: Angles that have the same terminal side. 60°, 420°, and –300° are all coterminal. Degrees to radians: Multiply angle by radians Radians to degrees: Multiply angle by Note: 1 revolution = 360° = 2π radians. Arc length = central angle x radius, or Note: The central angle must be in radian measure.
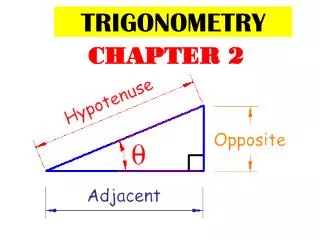
Right Triangle Trig Definitions B • sin(A) = sine of A = opposite / hypotenuse = a/c • cos(A) = cosine of A = adjacent / hypotenuse = b/c • tan(A) = tangent of A = opposite / adjacent = a/b • csc(A) = cosecant of A = hypotenuse / opposite = c/a • sec(A) = secant of A = hypotenuse / adjacent = c/b • cot(A) = cotangent of A = adjacent / opposite = b/a c a A C b
Special Right Triangles 30° 45° 2 1 60° 45° 1 1
Basic Trigonometric Identities Quotient identities: Even/Odd identities: Even functions Odd functions Odd functions Reciprocal Identities: Pythagorean Identities:
All Students Take Calculus. Quad I Quad II cos(A)>0 sin(A)>0 tan(A)>0 sec(A)>0 csc(A)>0 cot(A)>0 cos(A)<0 sin(A)>0 tan(A)<0 sec(A)<0 csc(A)>0 cot(A)<0 cos(A)<0 sin(A)<0 tan(A)>0 sec(A)<0 csc(A)<0 cot(A)>0 cos(A)>0 sin(A)<0 tan(A)<0 sec(A)>0 csc(A)<0 cot(A)<0 Quad IV Quad III
Reference Angles Quad I Quad II θ’ = 180° – θ θ’ = θ θ’ = π – θ θ’ = θ– 180° θ’ = 360° – θ θ’ = θ– π θ’ = 2π – θ Quad III Quad IV
Unit circle • Radius of the circle is 1. • x = cos(θ) • y = sin(θ) • Pythagorean Theorem: • This gives the identity: • Zeros of sin(θ) are where n is an integer. • Zeros of cos(θ) are where n is an integer.
Graphs of sine & cosine • Fundamental period of sine and cosine is 2π. • Domain of sine and cosine is • Range of sine and cosine is [–|A|+D, |A|+D]. • The amplitude of a sine and cosine graph is |A|. • The vertical shift or average value of sine and cosine graph is D. • The period of sine and cosine graph is • The phase shift or horizontal shift is
Sine graphs y = sin(x) y = sin(x) + 3 y = 3sin(x) y = sin(3x) y = sin(x – 3) y = 3sin(3x-9)+3 y = sin(x) y = sin(x/3)
Graphs of cosine y = cos(x) y = cos(x) + 3 y = 3cos(x) y = cos(3x) y = cos(x – 3) y = 3cos(3x – 9) + 3 y = cos(x) y = cos(x/3)
Tangent and cotangent graphs • Fundamental period of tangent and cotangent is π. • Domain of tangent is where n is an integer. • Domain of cotangent where n is an integer. • Range of tangent and cotangent is • The period of tangent or cotangent graph is
Graphs of tangent and cotangent y = tan(x) Vertical asymptotes at y = cot(x) Verrical asymptotes at
Graphs of secant and cosecant y = csc(x) Vertical asymptotes at Range: (–∞, –1] U [1, ∞) y = sin(x) y = sec(x) Vertical asymptotes at Range: (–∞, –1] U [1, ∞) y = cos(x)
Inverse Trigonometric Functions and Trig Equations Domain: [–1, 1] Range: 0 < y < 1, solutions in QI and QII. –1 < y < 0, solutions in QIII and QIV. Domain: Range: Domain: [–1, 1] Range: [0, π] 0 < y < 1, solutions in QI and QIV. –1< y < 0, solutions in QII and QIII. 0 < y < 1, solutions in QI and QIII. –1 < y < 0, solutions in QII and QIV.
Trigonometric IdentitiesHalf Angle Formulas The quadrant of determines the sign.
Law of Sines & Law of Cosines Law of sines Law of cosines Use when you have a complete ratio: SSA. Use when you have SAS, SSS.
Vectors • A vector is an object that has a magnitude and a direction. • Given two points P1: and P2: on the plane, a vector v that connects the points from P1 to P2 is v = i + j. • Unit vectors are vectors of length 1. • i is the unit vector in the x direction. • j is the unit vector in the y direction. • A unit vector in the direction of v is v/||v|| • A vector v can be represented in component form by v = vxi + vyj. • The magnitude of v is ||v|| = • Using the angle that the vector makes with x-axis in standard position and the vector’s magnitude, component form can be written as v = ||v||cos(θ)i + ||v||sin(θ)j
Vector Operations Scalar multiplication: A vector can be multiplied by any scalar (or number). Example: Let v = 5i + 4j, k = 7. Then kv = 7(5i + 4j) = 35i + 28j. Dot Product: Multiplication of two vectors. Let v = vxi + vyj, w = wxi + wyj. v·w = vxwx + vywy Example: Let v = 5i + 4j, w = –2i + 3j. v · w = (5)(–2) + (4)(3) = –10 + 12 = 2. Alternate Dot Product formula v · w = ||v||||w||cos(θ). The angle θ is the angle between the two vectors. v θ w Two vectors v and w are orthogonal (perpendicular) iff v · w = 0. Addition/subtraction of vectors: Add/subtract same components. Example Let v = 5i + 4j, w = –2i + 3j. v + w = (5i + 4j) + (–2i + 3j) = (5 – 2)i + (4 + 3)j = 3i + 7j. 3v – 2w = 3(5i + 4j) – 2(–2i + 3j) = (15i + 12j) + (4i – 6j) = 19i + 6j. ||3v – 2w|| =
Acknowledgements • Unit Circle:http://www.davidhardison.com/math/trig/unit_circle.gif • Text: Blitzer, Precalculus Essentials, Pearson Publishing, 2006.