Download
1 / 1
10 likes | 199 Views
Figure 4. The Arduino prototype board. Wii System Components to Track Ultrasound Probe and Create 3-D Images Van Gambrell , Laura Owen, Steven Walston , Jonathan Whitfield Advisor: Dr. Christopher Lee M.D. INTRODUCTION. DESIGN COMPONENTS. DESIGN PERFORMANCE AND SUCCESS.

E N D
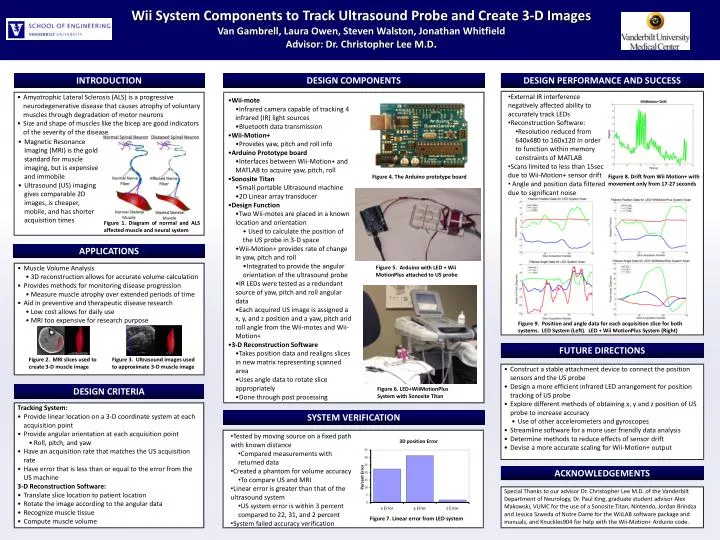
Figure 4. The Arduino prototype board Wii System Components to Track Ultrasound Probe and Create 3-D Images Van Gambrell, Laura Owen, Steven Walston, Jonathan Whitfield Advisor: Dr. Christopher Lee M.D. INTRODUCTION DESIGN COMPONENTS DESIGN PERFORMANCE AND SUCCESS • External IR interference negatively affected ability to accurately track LEDs • Reconstruction Software: • Resolution reduced from 640x480 to 160x120 in order to function within memory constraints of MATLAB • Scans limited to less than 15sec due to Wii-Motion+ sensor drift • Angle and position data filtered due to significant noise • Amyotrophic Lateral Sclerosis (ALS) is a progressive neurodegenerative disease that causes atrophy of voluntary muscles through degradation of motor neurons • Size and shape of muscles like the bicep are good indicators of the severity of the disease • Wii-mote • Infrared camera capable of tracking 4 infrared (IR) light sources • Bluetooth data transmission • Wii-Motion+ • Provides yaw, pitch and roll info • Arduino Prototype board • Interfaces between Wii-Motion+ and MATLAB to acquire yaw, pitch, roll • Sonosite Titan • Small portable Ultrasound machine • 2D Linear array transducer • Design Function • Two Wii-motes are placed in a known location and orientation • Used to calculate the position of the US probe in 3-D space • Wii-Motion+ provides rate of change in yaw, pitch and roll • Integrated to provide the angular orientation of the ultrasound probe • IR LEDs were tested as a redundant source of yaw, pitch and roll angular data • Each acquired US image is assigned a x, y, and z position and a yaw, pitch and roll angle from the Wii-motes and Wii-Motion+ • 3-D Reconstruction Software • Takes position data and realigns slices in new matrix representing scanned area • Uses angle data to rotate slice appropriately • Done through post processing • Magnetic Resonance Imaging (MRI) is the gold standard for muscle imaging, but is expensive and immobile • Ultrasound (US) imaging gives comparable 2D images, is cheaper, mobile, and has shorter acquisition times Figure 8. Drift from Wii Motion+ with movement only from 17-27 seconds Figure 1. Diagram of normal and ALS affected muscle and neural system APPLICATIONS • Muscle Volume Analysis • 3D reconstruction allows for accurate volume calculation • Provides methods for monitoring disease progression • Measure muscle atrophy over extended periods of time • Aid in preventive and therapeutic disease research • Low cost allows for daily use • MRI too expensive for research purpose Figure 5. Arduino with LED + Wii MotionPlus attached to US probe Figure 9. Position and angle data for each acquisition slice for both systems. LED System (Left). LED + Wii MotionPlus System (Right) FUTURE DIRECTIONS Figure 2. MRI slices used to create 3-D muscle image Figure 3. Ultrasound images used to approximate 3-D muscle image • Construct a stable attachment device to connect the position sensors and the US probe • Design a more efficient infrared LED arrangement for position tracking of US probe • Explore different methods of obtaining x, y and z position of US probe to increase accuracy • Use of other accelerometers and gyroscopes • Streamline software for a more user friendly data analysis • Determine methods to reduce effects of sensor drift • Devise a more accurate scaling for Wii-Motion+ output DESIGN CRITERIA Figure 6. LED+WiiMotionPlus System with Sonosite Titan • Tracking System: • Provide linear location on a 3-D coordinate system at each acquisition point • Provide angular orientation at each acquisition point • Roll, pitch, and yaw • Have an acquisition rate that matches the US acquisition rate • Have error that is less than or equal to the error from the US machine • 3-D Reconstruction Software: • Translate slice location to patient location • Rotate the image according to the angular data • Recognize muscle tissue • Compute muscle volume SYSTEM VERIFICATION • Tested by moving source on a fixed path with known distance • Compared measurements with returned data • Created a phantom for volume accuracy • To compare US and MRI • Linear error is greater than that of the ultrasound system • US system error is within 3 percent compared to 22, 31, and 2 percent • System failed accuracy verification ACKNOWLEDGEMENTS Special Thanks to our advisor Dr. Christopher Lee M.D. of the Vanderbilt Department of Neurology, Dr. Paul King, graduate student advisor Alex Makowski, VUMC for the use of a Sonosite Titan, Nintendo, Jordan Brindza and Jessica Szweda of Notre Dame for the WiiLAB software package and manuals, and Knuckles904 for help with the Wii-Motion+ Arduino code. Figure 7. Linear error from LED system