Download
1 / 16
220 likes | 536 Views
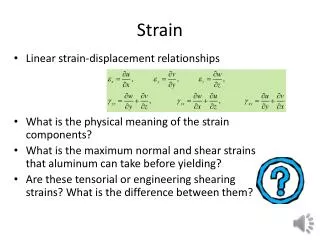
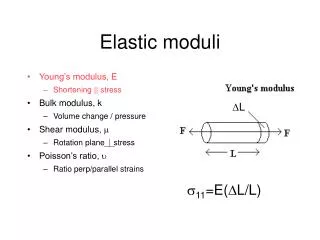
e = ( dui/duj + duj/dui ). e. ij. Elastic Strain Tensor. ?. Q: How do we know if strain occurs? A: Distance between two points change after deform. strain tensor. Strain = du/dx. 1. Definition Strain Tensor. 2. Rotation and Strain Matrices. Outline. 3. Examples.

E N D
e = (dui/duj + duj/dui ) e ij Elastic Strain Tensor ? Q: How do we know if strain occurs? A: Distance between two points change after deform strain tensor Strain = du/dx
1. Definition Strain Tensor 2. Rotation and Strain Matrices Outline 3. Examples
Angle between any two perp. lines doesn’t change nD Examples of Comp. (dvol.) & Shear Strains (dangle) Angle between any two perp. lines does change Q: How do we know if strain occurs? A: Distance between two points change after deform
du Simple Strain du=change in relative distance between two neighbor poins after deform Strain = du/dx dx
du Simple Strain du=change in relative location between two neighbor poins after deform Strain = du/dx dx
du u(x+dx) du dx dx’ dx u(x) x’ x 2 2 2 2 Original length squared: dl = dx + dx + dx = dxdx i i 1 3 2 2 dl = dx’ dx’ = (du +dx ) ‘2 i i i i 2 2 Length change: dl’ - dl = du du + 2du dx = du du + dx dx + 2 du dx i i i i i i i i i i Strain Tensor du=change in relative locations between two neighbor points after deform Two pts x and x+dx before deformation Deform volume and track two pts x’+dx’ We need to determine change in |dx| after deformation, that is |dx|2 - |dx’|2 > 0 indicates strain = dx+du dx Let’s strain, rotate, translate 2 points Deformation vector: du(x) = dx’- dx Relative neighbor location before (after): dx (dx’) Displacement vector: u(x) = x’- x Deformed length squared: (1) Q: How do we know if strain occurs? A: Distance between two points change after deform
du du u(x+dx) du dx dx’ dx u(x) x’ x (1) into equation (1) 2 2 Length change: dl’ - dl 2 2 Length change: dl’ - dl = 2du dx + du du i i i i (du + du + dudu )dxdx = i j j k k i dx dx dx dx j j i i Physical Meaning of Strain Tensor Physical Meaning of Strain Tensor Two pts x and x+dx before deformation Deform volume and track two pts x’+dx’ = dx+du dx Ignore (why?) (2) ~ Strain tensor Q: How do we know if strain occurs? A: Distance between two points change after deform 2du dx = du dxdx Substitute + du dxdx i i j i i j i j dx dx j i
du 3 3 dx du = S du = S dx + j i i j j=1 dx j=1 j u(x+dx) x+dx Symmetric strain tensor Rotation tensor e w u(x) ij ij y Deformation is the change in shape and/or size of a continuum body after it undergoes a displacement between an initial or undeformedconfiguration, at time 0 , and a current or deformed configuration at the current time t. dx Strain Tensor Summary Strain is the geometrical measure of deformation representing the relative displacement between particles in the material body, Displacement vector=absolute change in position after deform: Deformation vector= relative change in displacement of two neighboring points after deform: u(x+dx)-u(x)= i i du=Deformation vector after deform Time t=later Time t=0 x x’ What is physical meaning of dxTEdx? (see eqn 2) What is physical meaning of dxTEEdx ?
1. Definition Strain Tensor 2. Rotation and Strain Matrices Outline 3. Examples
du u(x+dx) du dx dx’ dx u(x) x’ x Strain Tensor Matrix Two pts x and x+dx before deformation Deform volume and track two pts x’+dx’ = dx+du dx ; u(x+dx) = x’+dx’- x- dx Displacement vector: u(x) = x’- x u(x+dx) = u(x) + du dx + du dy + du dz dx dy dz v(x+dx) = v(x) + dvdx + dvdy + dvdz dx dy dz w(x+dx) = w(x) + dwdx + dwdy + dwdz dx dy dz u(x+dx) u(x) du dudu dx dx dy dz v(x+dx) = v(x) + dvdvdv dy dx dy dz w(x+dx) = w(x) dwdwdw dz dx dy dz
u(x+dx) du dx dx’ dx u(x) x’ x Strain Tensor Matrix Two pts x and x+dx before deformation Deform volume and track two pts Deform volume and track two pts x’+dx’ = dx+du ; u(x+dx) = x’+dx’- x- dx Displacement vector: u(x) = x’- x u(x+dx) = u(x) + du dx + du dy + du dz dx dy dz v(x+dx) = v(x) + dvdx + dvdy + dvdz Decompose matrix into symmetric and antisymmetric parts dx dy dz e + W w(x+dx) = w(x) + dwdx + dwdy + dwdz dx dy dz u(x+dx) u(x) du dudu dx dx dy dz v(x+dx) = v(x) + dvdvdv dy dx dy dz w(x+dx) = w(x) dwdwdw dz dx dy dz
e e e e e e 11 11 12 12 13 13 e e e e e e 21 21 22 22 23 23 e e e e e e 31 31 32` 32` 33` 33` ax + by + cxy = cnst describes an ellipse 2 2 Similarity Transform: Rotation matrix so that strain matrix is diagonalized 2 2 ex + fy = cnst describes an ellipse with no crossterms No shear strains in this coordinate system! Principal Strain Directions e 0 0 e e e T 11 11 12 13 N N = 0 e 0 e e e 22 21 22 23 e e e e 0 0 33 31 32` 33` e33 Geometric Interpretation x2 x1 x2 x2 e11 rotation x1 x1 x1 x2 ) x1 ( x3 x1 T T [N ][N] [N ][N] e x2 ) x1 ( x3 x2 0 0 = cnst x2 = cnst 11 x3 x3 e 0 0 22 e 0 0 33` x1 ) x2 x2 x1 ( x3 x3
Principal Strain Directions x2 x2 x1 x1 Zero shear strains for above coord. system Shear strains for above coord. system
du 3 3 dx du = S du = S dx + j i i j j=1 dx j=1 j u(x+dx) x+dx Symmetric strain tensor Rotation tensor e w u(x) ij ij y Deformation is the change in shape and/or size of a continuum body after it undergoes a displacement between an initial or undeformedconfiguration , at time 0, and a current or deformed configuration at the current time t . dx Strain Tensor Summary Strain is the geometrical measure of deformation representing the relative displacement between particles in the material body, Displacement vector=absolute change in position after deform: u(r ) = r-r Deformation vector= relative change in displacement of two neighboring points after deform: 0 0 u(x+dx)-u(x)= i i Deformation vector after deform Displacement vector after deform Time t=later Time t=0 x x’
1. Definition Strain Tensor 2. Rotation and Strain Matrices Outline 3. Examples