Download
1 / 27
320 likes | 1.14k Views
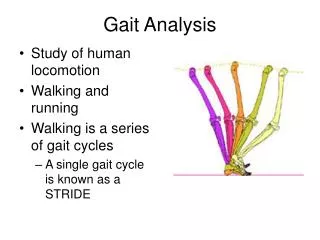
Gait. RLA - Gait Phases. Traditional Phases of Gait. Stance Phase (60%) Heel-strike (contact) Foot-flat Mid-stance point Heel-off Toe-off. Traditional Phases of Gait. Swing Phase (40%) Acceleration: TO Acceleration Midswing: Acceleration MSw Deceleration – MSw Deceleration.

E N D
Traditional Phases of Gait Stance Phase (60%) • Heel-strike (contact) • Foot-flat • Mid-stance point • Heel-off • Toe-off
Traditional Phases of Gait Swing Phase (40%) • Acceleration: TO Acceleration • Midswing: Acceleration MSw • Deceleration – MSw Deceleration
Ranchos Los Amigos (RLA) • Traditional references “Reference Limb” only • RLA references both limbs • RLA defines swing intervals more precisely
RLA Stance Phase 60% of Gait Cycle • Loading Response (LR) 0 - 10% [DS] • Midstance (MSt) 10 - 30% • Terminal Stance (TSt) 30-50% • Preswing (PSw) 50-60% [DS]
Instantaneous Events • Initial Contact (IC) • Toe-off (TO)
RLA Swing Phase 40% of Gait Cycle • Initial Swing (Isw) 60 - 73% • Midswing (MSw) 73 - 87% • Terminal Swing (TSw) 87 - 100%
RLA Locomotor Unit • Pelvis • LE Passenger Unit • HAT
Locomotor Functions Propulsion Stability Shock Absorption Energy Conservation • < 2” displacement
Task A: Weight Acceptance IC LR • IC opposite foot lifted (end of DS) • 0 - 10%
Task B: Single Limb Support MSt (initiation of SLS) • opposite foot lifted BW over forefoot • 10 - 30% TSt (completes SLS) • Heel rise of RL IC of opposite limb • 30 - 50%
Task C: Limb Advancement (Stance) PSw (initiation of second phase of DS) • IC of opposite limb ipsilateral toe-off • 50 - 60%
Task C: Limb Advancement (Swing) ISw • Toe-off swing foot is opposite stance limb MSw • Swing limb opposite stance limb swing limb tibia is vertical
Task C: Limb Advancement (Swing) TSw • vertical tibia IC
GRFV or Body Vector Effect of body weight HAT COG COP Relate GRFV to joint centers to determine: • magnitude and direction of joint instability
GRFV HAT COG (T10) GRFV COP
Moment External Internal
Rockers Heel Ankle Forefoot