Download
1 / 16
160 likes | 173 Views
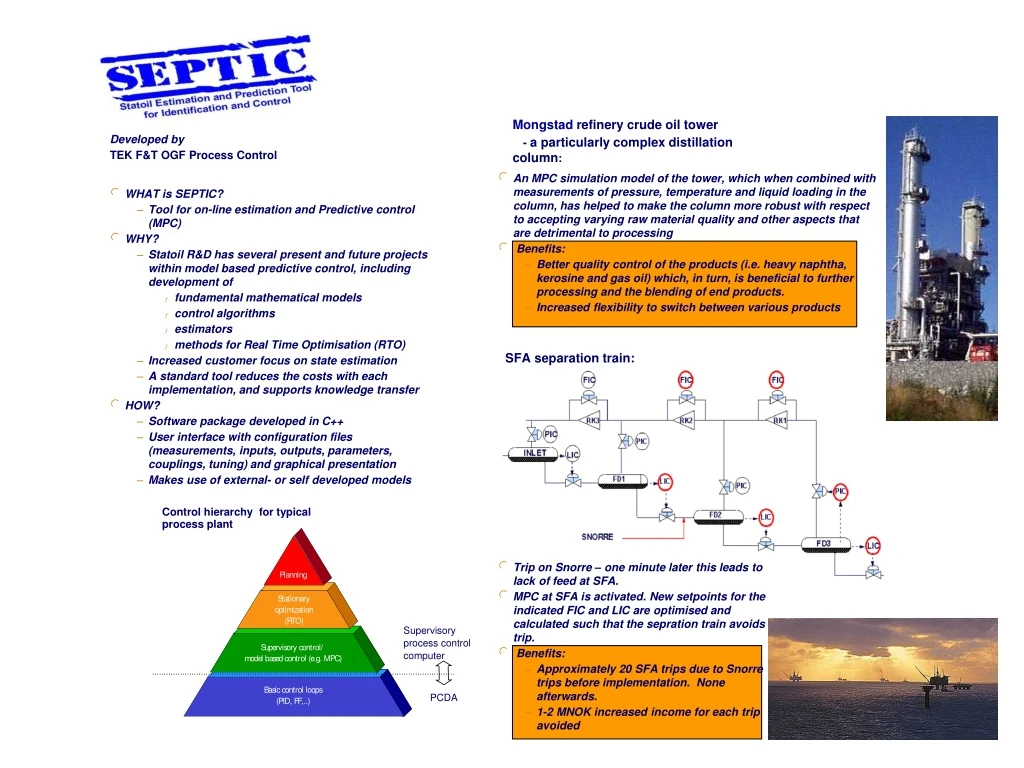
Learn how the TEK F&T OGF Process Control developed an MPC simulation model for the Mongstad Refinery crude oil tower. By combining measurements of pressure, temperature, and liquid loading, the column has become more robust in handling varying raw material quality and other detrimental aspects. Benefits include better quality control, increased flexibility, and improved blending of end products.

E N D
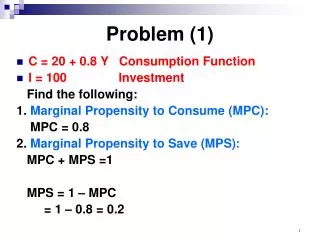
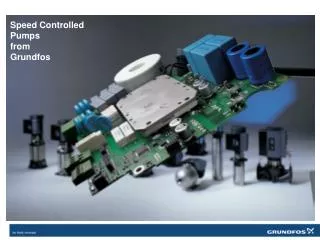
Mongstad refinery crude oil tower - a particularly complex distillation column: Developed by TEK F&T OGF Process Control • An MPC simulation model of the tower, which when combined with measurements of pressure, temperature and liquid loading in the column, has helped to make the column more robust with respect to accepting varying raw material quality and other aspects that are detrimental to processing • Benefits: • Better quality control of the products (i.e. heavy naphtha, kerosine and gas oil) which, in turn, is beneficial to further processing and the blending of end products. • Increased flexibility to switch between various products • WHAT is SEPTIC? • Tool for on-line estimation and Predictive control (MPC) • WHY? • Statoil R&D has several present and future projects within model based predictive control, including development of • fundamental mathematical models • control algorithms • estimators • methods for Real Time Optimisation (RTO) • Increased customer focus on state estimation • A standard tool reduces the costs with each implementation, and supports knowledge transfer • HOW? • Software package developed in C++ • User interface with configuration files (measurements, inputs, outputs, parameters, couplings, tuning) and graphical presentation • Makes use of external- or self developed models SFA separation train: • Trip on Snorre – one minute later this leads to lack of feed at SFA. • MPC at SFA is activated. New setpoints for the indicated FIC and LIC are optimised and calculated such that the sepration train avoids trip. • Benefits: • Approximately 20 SFA trips due to Snorre trips before implementation. None afterwards. • 1-2 MNOK increased income for each trip avoided
In-house tool Septic, Statoil Estimation and Prediction Tool for Identification and Control 25 MPC applications with Septic within Statoil Experimental step response models, built-in functionality for model gain scheduling Flexible control priority hierarchy Quality control by inferential models built from laboratory data or on-line analysers DCS/PCDA interfaces currently in Septic: Honeywell TDC3000 (CM90 on Vax computer), ABB Bailey via InfoPlus (AspenTech), ABB Bailey via ABB OPC server, ABB Bailey via Matrikon OPC server, Kongsberg Simrad AIM1000 (integrated). Septic also supports mechanistic type models, generally nonlinear models, for applications with wide operating regimes. Refining and Gas plant applications RCCU reactor/regenerator section (1) RCCU main fractionator (1) CDU atmospheric distillation (1) CDU feed preheat heat exchanger network (MPC) CDU feed preheat heat exchanger network (RTO) CDU heater pass balancing Coker Unit main fractionator (2 drums, 24-hours cycle) (1) CokerNaphtha/CokerLGO splitter (1) Visbreaker feed maximisation (1) Visbreaker main fractionator (1) LPG/Naphtha splitters (4) C3/C4 splitters (3) iC4/nC4 splitter (1) Medium/Heavy Naphtha splitter (1) Light/Medium Naphtha splitters (3) Model Predictive Control in Statoil
Hva oppnås med bedre regulering? Ved redusert varians, kan settpunkt flyttes nærmere øvre spesifiserte verdi
MPC: Generelt system Forstyrrelse, DVR v Regulert variabel, CVR prosess Pådrag, MVR u y x tilstand med bibetingelser tidsvektorer:
MPC: Generelt system Framtidige måling, "optimal" regulering (closed-loop respons) Referanse Framtidige måling basert på pådrag fra forrige beregning (open-loop respons) Framtidig "optimalt" pådrag Interpolert "optimalt" pådrag fra forrige beregning Nåtid t Prediksjonshorisont
Control priorities • MV ROC Limits • MV High/Low Limits • CV hard constraints • CV soft constraints, CV setpoints, MV ideal values: Priority level 1 • CV soft constraints, CV setpoints, MV ideal values: Priority level 2 • CV soft constraints, CV setpoints, MV ideal values: Priority level n • CV soft constraints, CV setpoints, MV ideal values: Priority level 99 Sequence av steady-state QP-solutions all priority levels handled Then a single dynamic QP to meet the possibly adjusted steady-state goals
MPC – Fundamental models (first principles) • Open loop response is predicted by nonlinear model • MV assumption : Interpolation of optimal predictions from last sample • Linearisation by MV step change • One step for each MV blocking parameter (increased transient accuracy) • QP solver as for experimental models (step response type models) • Closed loop response is predicted by nonlinear model • Compute linearisation error (difference open-loop + QP from simulated nonlinear closed-loop response) • Above threshold ---> closed-loop to "open-loop" and iterate solution • QP solution ---> defines line search direction with nonlinear model • Possibly closed-loop to "open-loop" and iterate
MPCT101 – Crude Tower – Manipulated, Controlled and Disturbance Variables
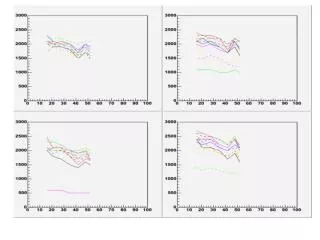
MPCSPLT – T-108 (LPG/Naphta), T-112 (Light/Medium Naphta), T-113 (Light/Medium Naphta)
T-112 and T-113, bottom C6-, inferentials (red) and analyzers (AI063 and AI104)

![AE = [ W + Y e – PL – r – mpc ∙ T + I + G + X ] + { mpc – mpm } Y](https://cdn1.slideserve.com/2599389/slide1-dt.jpg)