Download
1 / 32
340 likes | 644 Views
Advances in Sensor Data Fusion: A Review. Bahador Khaleghi Pattern Analysis and Machine Intelligence Lab. Outline. Introduction Multisensor Data Fusion Challenging Problems MDF Algorithms MDF Architectures Discussion Conclusion. Introduction.

E N D
Advances in Sensor Data Fusion: A Review BahadorKhaleghi Pattern Analysis and Machine Intelligence Lab
Outline • Introduction • Multisensor Data Fusion • Challenging Problems • MDF Algorithms • MDF Architectures • Discussion • Conclusion
Introduction • Data fusion is a technology to enable combining information from several sources in order to form a unified picture • Originally developed for military applications and now widely used in a multitude of areas, e.g. sensor networks, robotics, etc. • The literature on data fusion is rich and diverse and has been subject of research in many disciplines • We focus on sensor data fusion
Multisensor Data Fusion • Many definitions are proposed, e,g. JDL, Klein et al. Wald et al. “Information fusion is the study of efficient methods for automatically or semi-automatically transforming information from different sources and different points in time into a representation that provides effective support for human or automated decision making” - Boström et al. (2007)
MDF Conceptualizations • JDL formalism: characterize data I/O (popular) • Dasarathy’s framework: characterize data I/O + processing as data flow • Random set based: characterize data processing • Category theoretic formalism: most abstract and general
Why Is It challenging? • Data related issues • Imperfection: uncertainty, impreciseness, ambiguity, vagueness • Correlation (dependence) • Inconsistency: conflict, disorder, outliers • Forms: multi-modality, human-generated data • Organizational frameworks • Centralized, distributed, etc • Deployment issues • Data association and registration, operational timing, dynamic environment (phenomenon) • Other • Computational complexity, information overload, etc.
Fusion of Imperfect Data • Most fundamental problem of MDF systems • Several taxonomies exist, ours inspired by Smets et al. • Imperfection aspects • Uncertainty: associated confidence degree < 1 • Ambiguity: unable to clearly distinguish among several classes of objects • Vagueness: membership function does not have a crisp relation (i.e. 1: belong, 0: doesn’t belong) • Incompleteness: degree of confidence is unknown but the upper limit of confidence is given
Fusion of Imperfect Data: Probability • Oldest and well established approach to deal with uncertainty • Usually relies on Bayes rule to combine prior data with observations • Kalman filter and it extensions (EKF, UKF, etc.) • Most popular algorithms (esp. In tracking) • Assume linear system models and Gaussian additive noise • Efficient and easy to implement • Sequential Monte-Carlo based (Particle filter and its variants) • Applicable to non-linear models and non-Gaussian noise) • Computationally expensive (require large number of particles to accurately represent probability distributions)
Fusion of Imperfect Data: Evidential • Originally proposed by Dempster and mathematically formulated by Shafer in 1970s (Dempster-Shafer Theory) • Regarded as generalization of probability theory to treat uncertainty and ambiguity using probability mass functions defined over power set of possible events (i.e. universe of discourse) • Typically fuse evidence using Dempster’s rule of combination • Issues • Computationally expensive (exponential at worse case) • Counter-intuitive results for fusion of highly conflicting data
Fusion of Imperfect Data: Fuzzy Set • Proposed first by Zadeh in 1960s • Introduces the novel notion of partial set membership, which enables representation of vague data • Deploy fuzzy rules to produce fuzzy fusion output(s) • Useful to represent and fuse vague data produced by human experts in a linguistic fashion
Fusion of Imperfect Data: Possibility • Also founded by Zadeh in 1970s • Based on fuzzy set theory, yet developed to represent incomplete data • Treatment of imperfect data is similar in spirit to probability and D-S theory with a different quantification approach • Deploys fusion rules similar to fuzzy fusion • Arguably, the most appropriate fusion approach in poorly informed environments (no statistical data available)
Fusion of Imperfect Data: Rough Set • Developed by Pawlak in 1990s to handle ambiguous (indiscernible) data • Major advantage of rough set theory compared to other alternatives is that it does not require any preliminary or additional information • Relatively new theory and not well understood • Rarely applied to data fusion problems
Fusion of Imperfect Data: Hybridization • IDEA: various imperfect data fusion methods are complimentary and should be cooperating instead of competing • Hybrid Dempster-Shafer Fuzzy theory (Yen 1990) • Frequently studied in the literature • Hybrid Fuzzy Rough Set Theory (Dubios and Parade 1990) • Recently generalized to arbitrary fuzzy relations (Yeung et al. 2006)
Fusion of Imperfect Data: Random Set • Theoretical frameworks so far lend themselves to specific type(s) of imperfect data • Many practical applications involve complex situations where different types of imperfect data must be fused • Random set theory is a promising candidate solution to this issue to represent (and fuse) all aspects of imperfect data • Particularly useful for multi-source multi-target estimation problem
Fusion of Correlated Data • Many data fusion algorithms, including the popular KF, require either independence or prior knowledge of the cross covariance of data to produce consistent results • In practice correlation could be a prior unknown • Common noise acting on the observed phenomena • Rumour propagation (Data Incest) • If not addressed • Over confidence in fusion results • Divergence of fusion algorithm
Eliminating Data Correlation • Explicit incest removal • Usually assume a specific network topology as well as fixed communication delays • Recent extensions based on graph theory consider more general topologies with variable delays • Implicit incest removal • Attempt to form a decorrelated sequence of measurements by reconstructing them such that the correlation with previous intermediate updates from current intermediate state updates is removed
Fusion in Correlation Presence • Covariance Intersection • Avoids the problem of covariance matrix under-estimation due to data incest • Issues • Requires non-linear optimization • Rather pessimistic (tends to over-estimate) • Solutions • Fast CI • Largest Ellipsoid
Fusion of Inconsistent Data: Outliers • Data may be spurious due to unexpected situations • Permanent failures, short duration spike faults, or slowly developing failure • If fused with correct data, can lead to dangerously inaccurate estimates! • Mostly focused on identification/prediction (specific failure models) and subsequent elimination of outliers • Recent general Bayesian framework (Kumar et al. 2006): adds a new term to represent belief that data is not spurious
Fusion of Inconsistent Data: Disordered • Caused by • Variable propagation times • Heterogeneous sensors (operational timing) • How to use this, usually old, data to update the current estimate while accounting for the correlated process noise • Solutions • Discard or reprocess all • Mostly rely on retrodiction (backward prediction of the current state) • Assume single and multiple lags, various target dynamics, etc.
Fusion of Inconsistent Data: Conflictual • Several experts (sensors) have very different ideas about the same phenomenon • Heavily studied for D-S theoretic fusion • Zadeh’s counter-example • Solutions • Improper application of Dempster’s combination rules (constraints are not met!) • Many (ad-hoc) alternative combination rules • Transferable Believe Model (TBM): relies on open-world assumption, and allowing elements outside the frame of discernment to be represented by the empty set
Fusion of Disparate Data • Fusion data can come in many forms • Multi modality of sensors • Human-generated (soft) data • Fusion of soft as well as hard/soft data is hot recent topic and no well studied • Recent trends • Disambiguation of linguistic data (lexicons, grammars, and dictionaries) • Human-centered data fusion: allows humans to participate in data fusion process not merely as soft sensors but also hybrid computers and ad-hoc teams (social networks and virtual worlds)
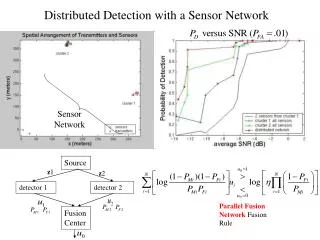
Centralized Data Fusion • Sensor fusion unit is treated as a central processor that collects all information from the different sensors • Pros • Can achieve optimal performance (theoretically) • Cons • Communication bottleneck • Scalability issue • Reliability issue • Inflexible
Distributed Data Fusion • Each node in the sensor field can act as a local data fusion unit using local measurements • Fusion process is usually iterative and ideally converges to global results • Pros • Scalability, reliability and robustness, efficiency • Cons • Inherent lack of global structure, i.e. difficult to control and predict the behaviour • Recent approaches based on graphical models appear promising
Hierarchical Data Fusion • Adopts a top-down decomposition of fusion tasks • Pros • Reducing the communication/computational burden • Rather deterministic behaviour • Cons • Significant change of situation may lead to requirement for an entirely different hierarchy of tasks and therefore a large amount of overhead
Federated Data Fusion • Hybrid architecture of hierarchical and distributed schemes • Offers the high fusion autonomy of sensor nodes found in distributed architectures • Requires data communication among nodes to go through dedicated middle nodes, as in hierarchical scheme • Pros: enhanced robustness and flexibility • Cons: does not support dynamic restructuring necessary for data fusion in extremely dynamic environments
Discussion: Emerging Trends • Opportunistic fusion • Rely on new ubiquitous computing and communication technologies and treat sensors as shared resources • Fusion of negative information • Use data related to absence of any feature within the effective sensor range (e.g. Robot localization) • Soft/Hard data fusion • Emphasize role of user(human) in fusion process • Unified fusion framework • Search for a theoretical framework that enables formalization of all aspects of data fusion • Fusion and learning • Enhance performance by enabling fusion algorithm to adapt to changes in the operational environment
Discussion: On-going Research • Optimization-based fusion • Treat data fusion as an optimization of often heuristically defined objective function, e.g. evolutionary algorithms • Automated fusion • Apply formal methods to autonomously develop fusion algorithms based on formally presented specifications • Distributed data fusion • Highly scalable and adaptive to environment dynamics • Belief reliability • Study the reliability of underlying models producing belief about imperfect data • Evaluation framework • Most fusion evaluation unrealistic (in simulation) and no standard evaluation platform
Conclusion • A brief overview of vast literature on sensor data fusion was presented • Existing fusion algorithms were discussed according to a novel data-driven taxonomy • Common fusion architectures were described • Some of the existing gaps in literature work were identified • Active and emerging areas of research in fusion community were introduced