Download
1 / 26
260 likes | 378 Views
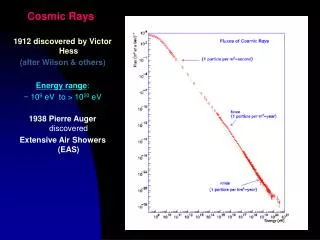
Detecting Cosmic Rays in Infrared Data. Rachel Anderson Karl Gordon. Outline. The CR Problem Linear Fit Algorithm CR Detection Methods The 2-Point Difference Method The Deviation from Fit Method The Y-Intercept Method Results. The CR Problem.

E N D
Detecting Cosmic Rays in Infrared Data Rachel Anderson Karl Gordon RIAB Monthly Meeting
Outline • The CR Problem • Linear Fit Algorithm • CR Detection Methods • The 2-Point Difference Method • The Deviation from Fit Method • The Y-Intercept Method • Results RIAB Monthly Meeting
The CR Problem • Every 1000 seconds, up to 20% of the field of view of JWST will be affected by CRs Offenberg, J.D., et al. 1999 Rouscher, B., et al. 2000, STScI-NGSTR-0003A RIAB Monthly Meeting
The CR Problem • Every 1000 seconds, up to 10% - 20% of the field of view of JWST will be affected by CRs + CR = Offenberg, J.D., et al. 1999 Rouscher, B., et al. 2000, STScI-NGSTR-0003A RIAB Monthly Meeting
The CR Problem (cont.) • The Question: What is the best we can do, given the noise in the ramp? • The How: • Simulate non-destructive read ramps. • Add some CRs with various magnitudes and locations. • Test CR detection methods, then try to find them. RIAB Monthly Meeting
Linear Fit Algorithm We want to solve the equation: Y = AX, with solution: X = [ATC-1A]-1[ATC-1Y] , and C = , A = , X = Y = Fixsen, D. J., et al. 2000, PASP, 112, 1350 Gordon, K. D., et al. 2005, PASP, 117, 503 Hogg, D. W. et al. 2010, ArXiv e-prints RIAB Monthly Meeting
Linear Fit Algorithm We want to solve the equation: Y = AX, with solution: X = [ATC-1A]-1[ATC-1Y] , and C = , A = , X = Y = It is easiest to think of C as the sum of two matrices: C = R + P R = r2I , and P = Fixsen, D. J., et al. 2000, PASP, 112, 1350 Gordon, K. D., et al. 2005, PASP, 117, 503 Hogg, D. W. et al. 2010, ArXiv e-prints RIAB Monthly Meeting
CR Detection Methods • Three methods: • 2- Point Difference • Deviation from Fit • Y-Intercept • For each method: • Detect CRs (largest first) • Calculate the slope for the resulting ‘semi-ramps’ • Calculate final slope of entire ramp by taking weighted average of the slopes of the ‘semi-ramps’ Regan, M. 2007, JWST-STScI-001212 Robberto, M. 2008, JWST-STScI-0001490, SM-12 RIAB Monthly Meeting
2-Point Difference | di – μd | σd Ratio = di = yi – yi-1 μd: median of di’s σd = √2rn2 + pn2 … where pn = √μd RIAB Monthly Meeting
Deviation From Fit yi – fi σi devi = RIAB Monthly Meeting
Y-Intercept | b2 – b1 | σb Ratio = σb = √2rn2 + pn2 … where pn = √ m , and rn is calculated from un-correlated errors in our linear-fit program. RIAB Monthly Meeting
Results: Fraction Found vs. False Detections 40 Frames, Input Slope: 10.00 DN/s RIAB Monthly Meeting
Results: Fraction Found vs. False Detections 40 Frames, Input Slope: 0.00 DN/s RIAB Monthly Meeting
Results: Multiple CR’s 2-Point Difference RIAB Monthly Meeting
Conclusions • To optimize results, our linear fit algorithm must take into account correlated and un-correlated errors. • The 2-Point Difference method is simple, fast, consistent, and best for photon-noise dominated regime. • The Y-Intercept method is better in read-noise dominated regime. RIAB Monthly Meeting
Results: Number of Frames Slope = 10.0 DN/s Fraction of False Detections = 0.05 RIAB Monthly Meeting
Results: Various Slopes 2- Point Difference RIAB Monthly Meeting
Results: Various Slopes Deviation from Fit RIAB Monthly Meeting
Results: Various Slopes Y-Intercept RIAB Monthly Meeting
Linear Fit Algorithm (cont.) slopecalc / (slope-1) RIAB Monthly Meeting
Results: Number of Frames 2-Point Difference Slope = 0.00 DN/s Slope = 10.00 DN/s RIAB Monthly Meeting
Results: Number of Frames Deviation from Fit Slope = 0.00 DN/s Slope = 10.00 DN/s RIAB Monthly Meeting
Results: Number of Frames Y-Intercept Slope = 0.00 DN/s Slope = 10.00 DN/s RIAB Monthly Meeting
Results: Multiple CR’s Deviation from Fit RIAB Monthly Meeting
MIRI Parameters RIAB Monthly Meeting
Results: Multiple CR’s Y-Intercept RIAB Monthly Meeting