Download
1 / 20
200 likes | 364 Views
Team Epimetheus Wireless Robot Module. EE682 Dr. Steven Bibyk. Objective. To build a wireless sensor module using the robot platform. To gain knowledge and experience for future projects and presentations. To have a technical understanding of projects and designs. Platform Specification.

E N D
Team EpimetheusWireless Robot Module EE682 Dr. Steven Bibyk Team Epimetheus
Objective • To build a wireless sensor module using the robot platform. • To gain knowledge and experience for future projects and presentations. • To have a technical understanding of projects and designs. Team Epimetheus
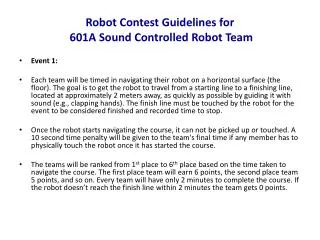
Platform Specification • Wireless sensor module is to collect data from the OSU-FIRST robot Team Epimetheus
= Power Lines = Data Lines Block diagram Wireless Communication Interface Sensor Array Analog / Digital Conversion Host MCU User Interface / Receiver / Video Capture Power Management X10 Video System Team Epimetheus
Matrix Management P = Primary Lead S = Secondary Team Epimetheus
Micro-Controller Unit • Microchip PIC (16F877) • Programmed in assembly using MPLAB • 4 MHz Clock Speed • Built-in Synchronous Serial Port (SSP) and Universal Synchronous/Asynchronous Receiver/Transmitter (USART) • 8K of FLASH program memory; 368 bytes data memory Team Epimetheus
Micro-Controller Unit • PIC communication with A/D • PIC to MAXIM A/D communication performed using Serial Peripheral Interface (SPI) compatible bus through SSP module. • PIC acts as the master and generates the clock at a rate of Fosc/4. • Data is simultaneously clocked in/out of SSP buffer. • RPM and Battery Voltage data checked on-board the PIC for validity. Team Epimetheus
Micro-Controller Unit • PIC Communication with PC • Standard RS232 serial link • Take advantage of built in USART on PIC • PIC hardware handles construction/transmission of each byte and baud rate timing issues • Achieve transmit speeds up to 19200bps • Too much error in baud rate calculation past 19200 • Assemble 23 byte data packet and send Team Epimetheus
Micro-Controller Unit Code Overview Main Routine Data Test Routine Start RPM Valid? Flag RPM bit in TX Packet NO Initialize PIC YES Read/Store ADC Data BATT Valid? Flag BATT bit in TX Packet NO Data Test Routine Transmit Data Generate 16-bit Checksum Team Epimetheus
Power Management • Power Supply • 12 volt lead acid battery • +/-12v, +/-10v, +6v, +/-5v • 3 adjustable regulators • National Semiconductor • LM2991 • LM2941 Team Epimetheus
Power Management • Management • Monitoring of voltage levels in the battery • Auto shutdown of the video = Resistor +12 10Ω/5W +10 12 V 2941 +6 2941 +5 GND 2991 -5 12 V 10Ω/5W -10 -12 Team Epimetheus
Sensors • RPM Sensor (2) • Purpose • Will be used to count the number of rotations of a particular wheel in order to approximately determine the velocity of the robot. • RPM Sensor Components • A pinwheel with alternating reflective and non-reflective surfaces. • An Omron reflective sensor (continuous beam) • A 8-bit binary counter (TI SN74HC590A) • A 8-bit DAC (National DAC0808) • An Op-amp Team Epimetheus
Sensors • Temperature Sensor (2) • Thermometrics NTC Thermistor • Epoxy coated solid state sensor • Suitable for PCB and probe mountings • Current Sensors (3) • One 100 amp sensor for battery current • F.W. Bell BB-100 Hall effect current sensor • Two 25 amp sensors for motor current • Amploc Amp25 current sensor Team Epimetheus
Wireless Communication • Requirements • Send data and video from sensor module to User Interface computer • Transmit data up to 100 meters • Solution • Wireless Serial link • Parallax RF product (27987, 27986) • 433.92 MHz • 250 feet Team Epimetheus
Wireless Communication • Packet Definition Team Epimetheus
Server Daemon • Utilizes java packages • javax.comm • java.net • Cross-platform • Threads used for opening new network sockets • Formats serial data for passing to applet Team Epimetheus
Program Flow • Wireless Serial Data to Server Daemon • Daemon network Thread passes info to Applet • Multiple graphics threads update applet Team Epimetheus
User Interface • GUI • Java Applet • Displays Values and Graphs - • RPM Wheel Data (2) • Temperature Data (2) • Motor Current Data (2) • Battery Current Data Team Epimetheus
Proposed Schedule Team Epimetheus
Moving Forward • Continue parts acquisition • Re-acquire PIC • Once parts are in: • Continue sensor work • Continue UI integration • Add in wireless comm. • Test and debug • Time permitting, incorporate video Team Epimetheus