Download
1 / 21
230 likes | 419 Views
Adaptive IIR Filter. Terry Lee EE 491D May 13, 2005. Outline. Linear Filters – FIR & IIR Least-mean-square algorithm Adaptive IIR using: Output Error Method Equation Error Method Simulations Applications. Linear Filters. IIR Filter ~ Autoregressive Moving-Average (ARMA)

E N D
Adaptive IIR Filter Terry Lee EE 491D May 13, 2005
Outline • Linear Filters – FIR & IIR • Least-mean-square algorithm • Adaptive IIR using: • Output Error Method • Equation Error Method • Simulations • Applications
Linear Filters IIR Filter ~ Autoregressive Moving-Average (ARMA) present and past inputs and past outputs FIR Filter ~ Moving-Average (MA) present and past inputs
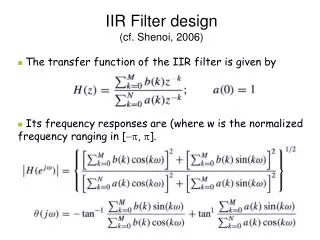
IIR Filter Difference equation of ARMA model y(n) = ∑ ai(n)u(n-i) + ∑ bi(n)y(n-i) M N i=0 i=1 Forward filter Backwards filter
Least-Mean-Square (LMS) Algorithm • Linear adaptive filtering algorithm • Differs from steepest descent • Widely used for its simplicity • Consists of: 1) A filtering process (mainly FIR model) 2) An adaptive process
Least-Mean-Square (LMS) Algorithm Following the steepest descent algorithm, with an unknown environment: • Tap-input vector: u(n) • Tap-weight vector: w(n) • Estimation error: e(n) • Cost function: J(n)=[|e(n)|] • Gradient vector: J(n) • Update tap-weight vector: ŵ(n+1) ∆
Summary of (LMS) Algorithm Parameters: M = # of taps (length of filter) μ = step-size parameter Filter output is: y(n) = ŵH(n)u(n) Error signal is: e(n) = d(n) – y(n) Tap-weight vector: ŵ(n+1) = ŵ(n) + μu(n)e*(n)
Important Factors of an Algorithm • Rate of convergence • Misadjustment • Tracking • Robustness • Computational Requirements • Structure
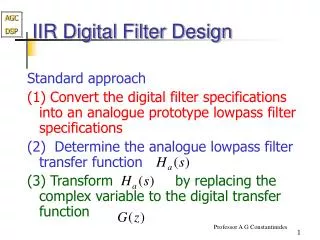
Adaptive IIR Filter Motivation: To build the adaptive process around a linear IIR filter with fewer number of adjustable coefficients than an FIR filter to achieve a desired response.
Adaptive IIR Filter Two approaches: • Output error method • Equation error method
y replaced by d Equation Error Method y(n) = ∑ ai(n)u(n-i) + ∑ bi(n)d(n-i) M N i=0 i=1
Output Error and Equation Error IIR has problems! • possible instability • slow convergence • local minima
Simulation LMS adaptive FIR filter for equalization
Simulation LMS adaptive FIR filter for equalization
Simulation LMS adaptive FIR filter for equalization
Applications of IIR • acoustic echo cancellation • linear prediction • adaptive notch filtering • adaptive differential pulse code modulation • adaptive array processing • * channel equalization *
Adaptive Equalizer • Telephone channels • Fading radio channels • Bandwidth-limited channels • Removes ISI • Recovers information
Decision-Feedback Equalizer (Most popular adaptive IIR equalizer)
IIR vs. FIR • IIR has slower convergence rate • IIR is UNSTABLE • IIR introduces more complex structures TRADEOFF: • IIR uses less coefficients than FIR *computationally cheaper* *able to implement more complex filters*
Summary • Linear Filters – FIR & IIR • Least-mean-square algorithm • Adaptive IIR using: • Output Error Method • Equation Error Method • Simulations • Applications