Download
1 / 39
390 likes | 610 Views
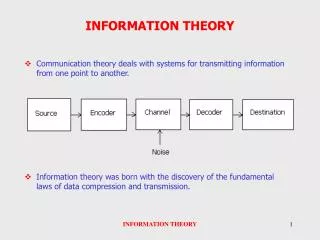
Rational Behavior: Theory and Application to Pay and Incentive Systems. Semyon M. Meerkov Department of Electrical Engineering and Computer Science The University of Michigan Ann Arbor, MI 48109-2122 Fifth International Conference on Analysis of

E N D
Rational Behavior: Theory and Application to Pay and Incentive Systems Semyon M. Meerkov Department of Electrical Engineering and Computer Science The University of Michigan Ann Arbor, MI 48109-2122 Fifth International Conference on Analysis of Manufacturing Systems – Production Management Zakynthos Island, Greece May 21, 2005
MOTIVATION • 98% of personnel in the US automotive industry are paid-for-time • A form of pay-for-performance (annual company-wide bonus) does not seem to be effective • Question: How should a pay and incentive system be designed so that company performance is optimized?
To formalize this question, assume that the behavior of a worker can be classified into two states, X1 and X2 Decision space, X
How to create conditions under which the worker operates in X1 through his/her own self-interest? In other words, how to introduce an “INVISIBLE HAND” in manufacturing? • This talk is intended to provide a partial answer to these questions • Specifically, it provides a formal model, which can be used for analysis, design, and continuous improvement of pay and incentive systems using quantitative techniques
This is accomplished by axiomatically introducing the notion of individual rational behavior and then creating collectives or groups of rational decision makers • This is followed by analysis of properties of individual and group behavior of rational elements • Finally, an asymptotic analysis (with respect to the size of the group and the level of individual’s rationality) leads to the conclusions on the efficacy of various pay and incentive systems
OUTLINE 1. Modeling and analysis of individual rational behavior 2. Modeling and analysis of group rational behavior 3. Application to a pay and incentive system 4. Research program 5. Conclusions
MODELING AND ANALYSIS OF INDIVIDUAL RATIONAL BEHAVIOR 1.1 Rational Behavior • Behavior – a sequence of decisions in time, i.e., a dynamical system in the decision space X: X x0, t0
X B x0, t0 t’ • Rational behavior – the behavior , which satisfies the following axioms: • Ergodicity:
x0, t0 B1 x1 . . B2 x2 • Rationality: X • (x) → penalty function at decisionx • N → measure of rationality
…….. 5% 10% 70% • Mice in feeding behavior X X • Dog in the circle experiment X1 X2 x x x x x x x x • Workers in production (Safelite Glass, Lincoln Electric) x x x x x X1 X2 1.2 Examples of Rational Behavior 1.2.1 Natural systems • Bees in foraging behavior X
(x) • Ergodicity takes place • Rationality: 1 x x* 0 • Additional property: 1.2.2 Mathematical systems • Ring element:
x3(t) 1 (x) x* T3 x* x20(t) t 1 x 0 0 1 x* T20 t 0 • Illustration:
(x) x • A search algorithm
2. MODELING AND ANALYSIS OF GROUP RATIONAL BEHAVIOR 2.1 Groups of Rational Individuals • Group – a set of M > 1 rational individuals interacting through their penalty functions: • Group state space: • Sequential algorithm of interaction:
2.2 Homogeneous Fractional Interaction • Mindividuals, Xi=X, ∀i • Assume that at t0: X
f() (t0) * 1 • Homogeneous Fractional Interaction – an interaction defined by the group penalty function:
f() 1 • Group penalty function defines the penalty function of each individual as follows: • For • For
Desirable state • Question: • Interpretation • Beehive food distribution • Corporation-wide bonuses • Uniform wealth distribution
f2() f1() (t0) 1 ** 2.3 Inhomogeneous Fractional Interaction • M individuals,Xi=X, ∀i • Inhomogeneous Fractional Interaction – an interaction defined by two subgroup penalty functions X
f2 f1 1 • Penalty for each individual are defined as follows: • For • For
Interpretation Differentiated corporate bonuses system Non-even wealth distribution Desirable state: Nash equilibrium Question:
2.4 Properties of Group Behavior under Homogeneous Fractional Interaction • Theorem: Under the homogeneous fractional interaction, the following effect of “critical mass” takes place: C> 0, such that • = 0.5 implies the state of maximum entropy – the group behaves like a statistical mechanical gas (no rationality)
Empirical observations • Beehive → when M becomes large, the family splits • Abnormal behavior of unusually large groups of animals (locust, deers, etc.) • Pay-for-group-performance (cooperate-wide bonuses, BP – Prudhoe Bay vs. Anchorage)
Theorem: Under the inhomogeneous fractional interaction,no effect of “critical mass” takes place: N* such that ∀N N* 2.5 Properties of Group Behavior under Inhomogeneous Fractional Interactions • Assumeunique ** such that f1(**) = f2(**) and
Road 2 Road 1 Penalty function: 3. APPLICATION TO A PAY AND INCENTIVE SYSTEM (Joint work with Leeann Fu) 3.1 Scenario B A
Problem 1: Assuming that each driver exhibits rational behavior, investigate the distribution of the vehicles between Road 1 and Road 2 • Problem 2: Assuming that the drivers are rational and given a fixed amount of goods to be transported from A to B, analyze the total time necessary to transport the goods under different pay systems: • Pay-for-individual-performance • Pay-for-group-performance • Pay-for-time
3.2 Parameters Selected • M =6 • N =var • Road systems • System 1: • System 2:
System 2: 3.3 Problem 1 • Penalty functions • System 1:
Results • System 1:
3.4 Problem 2 • Penalty functions • System 1: User eq. = System eq.: * = **
System 2: User eq. ≠ System eq.: * ≠ **
Results • System 1
For system 2 3.5 Comparisons • For system 1
3.6 Discussion • User equilibrium = system equilibrium (* = **): pay-for-individual-performance is the best • User equilibrium ≠ system equilibrium (* ≠ **): pay-for-group-performance maybe the best (if M is sufficiently small and N is sufficiently large)
4. RESEARCH PROGRAM4.1 Applications • Methods for performance measurement in manufacturing environment (Deming and co.) • Evaluation of N for a typical worker • Design various pay for performance systems, based on measurements available • Pay-for-individual-performance • Pay-for-group-performance • Evaluate the upper bound on M, so that pay-for-group-performance is effective • Experiments • Implementation
4.2 Theory • Learning in the framework of rational behavior • Modeling of experience-based learning • Analysis of rational behavior with learning • Groups of individuals with different levels of rationality • Group behavior under rules of interaction other than fractional • Purely probabilistic approach to rational behavior (classes of functions, which characterize rational “deciders”) • General theory of rational deciders
5. CONCLUSION • Manufacturing Systems = machines + people • Machines have been well investigated during the last 50 years • “Control” of people in manufacturing environment is a less studied topic (quantitatively) • The ideas described present an approach to accomplish this