Download
1 / 12
120 likes | 149 Views
Realistic Model of the Solenoid Magnetic Field. Objectives Closed-loop model Field calculation corrections Helical model Realistic model Conclusions + further work. Paul S Miyagawa, Steve Snow University of Manchester. Objectives.

E N D
Realistic Model of the Solenoid Magnetic Field • Objectives • Closed-loop model • Field calculation corrections • Helical model • Realistic model • Conclusions + further work Paul S Miyagawa, Steve Snow University of Manchester
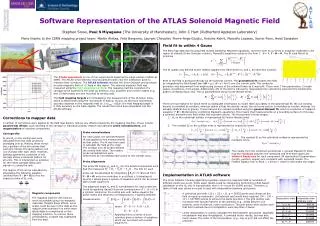
Objectives • Simulations of the performance of the solenoid field mapping machine have been based on a simple model of the B-field. • Want to test the performance with a more realistic model. • Realistic model seeks to improve on several aspects: • Calculating the field from a curved current path • Modelling the actual current path • Modelling the shape of the solenoid Solenoid Field Mapping Meeting
Closed-Loop Model • Previously, the solenoid was modelled as a series of closed circular loops of infinitely thin wires evenly spaced in z. • For calculating the field, each loop approximated as 800 straight-line segments, and Biot-Savart law applied to each segment. • Added in field due to magnetised iron (4% of total field). • Model is symmetric in and even in z. Solenoid Field Mapping Meeting
Field Calculation Corrections • We approximate the true current path, which is helical, with straight-line segments whose end points lie on the true path. • This leads to two types of error: Inscribed polygon error • If a circle is replaced by an inscribed polygon, the average radius of the polygon is less than the radius of the circle. • This effect can be corrected by increasing the radius by 2/3 of S where S is the sagitta between the arc and the chord. Line segment integration error • The natural approximation is to use the midpoint of the segment to calculate r between the segment and the measurement point. • This leads to an error because r is different for each point on the line. This error is more significant than the inscribed polygon error. • A correction factor can be added to the magnitude of the field: Solenoid Field Mapping Meeting
Field Calculation Corrections z = 0, r = 0 z = 1, r = 0 z = 0, r = 0.8 z = 1, r = 0.8 Solenoid Field Mapping Meeting 100 steps most likely sufficient, but we use 200 to be safe.
Helical Model • First step towards a realistic model is to replace the series of closed loops with a helical coil. • The current starts at (0,R,hz), winds in anti-clockwise direction, and terminates at (0,R,-hz). Note that this does not form a closed path. • The overall dimensions of the coil are the same as for the closed-loop model. • Model is neither symmetric in nor even in z. • Main differences with closed-loop model are at the ends of the coil due to difficulty in lining up the ends. Solenoid Field Mapping Meeting
Realistic Model • The ATLAS solenoid consists primarily of four main coil sections. • The last loop from each section is welded to the first loop of the next section to form a single coil. • At end A, an extra cable is welded to the last loop, and the two cables are routed up through the services chimney. • At end C, an extra cable is welded to the last loop. The two cables form the return coil, which is routed along the cryostat surface to end A and up into the chimney. • Cables in the chimney are magnetically shielded. • The realistic model models the current through these main components. Solenoid Field Mapping Meeting
Return Coil • The return coil consists of the two cables from the end C weld running flat along the cryostat surface. The extra cable rests on top of the main cable. • The cables are electrically isolated, so they carry the current in ratio 80:20. • In the realistic model, the cables connect to the cables from the end A weld so as to form a closed current path for the entire solenoid. Solenoid Field Mapping Meeting
The dimensions given are for a warm coil in quiescent conditions. The real coil will be deformed: Shrinkage due to cool down. This is modelled as an overall scale reduction of 0.41%. Bending due to field excitation. This is modelled as the radius r being a parabolic function of z. At the centre, Δr = 0.90 mm; at the coil ends, Δr = 0.38 mm, Δz = 1.09 mm. Shape Deformations Solenoid Field Mapping Meeting
Field from Realistic Model Solenoid Field Mapping Meeting
Conclusions • Developed realistic model of the solenoid B-field which makes several improvements over the simple closed-loop model. • Corrections made for errors which arise from approximating curved current paths with straight-line segments: • inscribed polygon error • line segment integration error • Modelled the actual current path: • four main coil sections • welds between main sections • welds at end of solenoid • return current coil • Modelled real shape of solenoid: • shrinkage due to cool down • bending due to field excitation • Made comparisons with previous model: • Most adjustments to Bz and Br components are O(10 gauss). • Greatest adjustments are at boundaries (coil ends, weld regions). • Return coil has greatest effect on Bφ component. Solenoid Field Mapping Meeting
Further Work • Investigate further refinements of realistic model: • Current flow through cable cross-section (2×6 array of wires). • Simulate performance of field mapping machine and fitting routines using B-field from realistic model. Solenoid Field Mapping Meeting