Download
1 / 1
10 likes | 166 Views
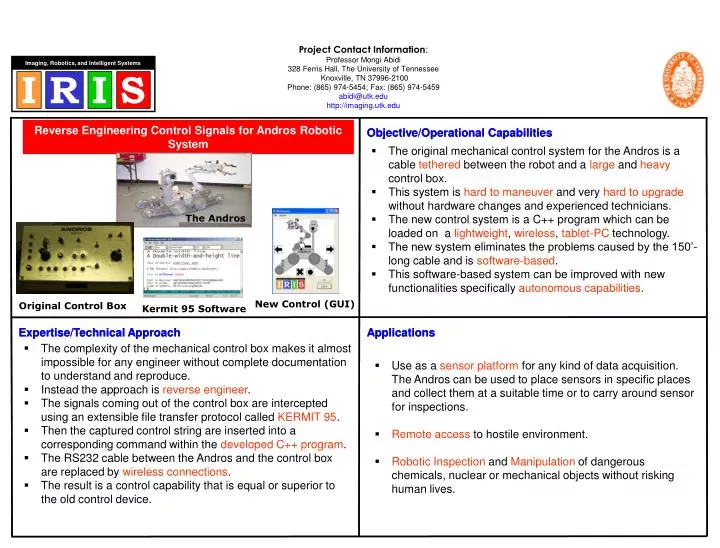
Original Control Box. Kermit 95 Software. New Control (GUI). Reverse Engineering Control Signals for Andros Robotic System. Objective/Operational Capabilities. The original mechanical control system for the Andros is a cable tethered between the robot and a large and heavy control box.

E N D
Original Control Box Kermit 95 Software New Control (GUI) Reverse Engineering Control Signals for Andros Robotic System Objective/Operational Capabilities • The original mechanical control system for the Andros is a cable tethered between the robot and a large and heavy control box. • This system is hard to maneuver and very hard to upgrade without hardware changes and experienced technicians. • The new control system is a C++ program which can be loaded on a lightweight, wireless, tablet-PC technology. • The new system eliminates the problems caused by the 150’-long cable and is software-based. • This software-based system can be improved with new functionalities specifically autonomous capabilities. The Andros Expertise/Technical Approach Applications • The complexity of the mechanical control box makes it almost impossible for any engineer without complete documentation to understand and reproduce. • Instead the approach is reverse engineer. • The signals coming out of the control box are intercepted using an extensible file transfer protocol called KERMIT 95. • Then the captured control string are inserted into a corresponding command within the developed C++ program. • The RS232 cable between the Andros and the control box are replaced by wireless connections. • The result is a control capability that is equal or superior to the old control device. • Use as a sensor platform for any kind of data acquisition. The Andros can be used to place sensors in specific places and collect them at a suitable time or to carry around sensor for inspections. • Remote access to hostile environment. • Robotic Inspection and Manipulation of dangerous chemicals, nuclear or mechanicalobjects without risking human lives.