Download
1 / 33
330 likes | 512 Views
Processer/tråde. Et stykke software der håndtere skiftet af CPU’en. Dispatcher. Et antal selvstændige programmer. Processer. Plus det løse til: Oprettelse af processer. Synkronisering af processer. Kommunikation mellem processer. Proces. Et program der eksekveres. En ressource enhed.

E N D
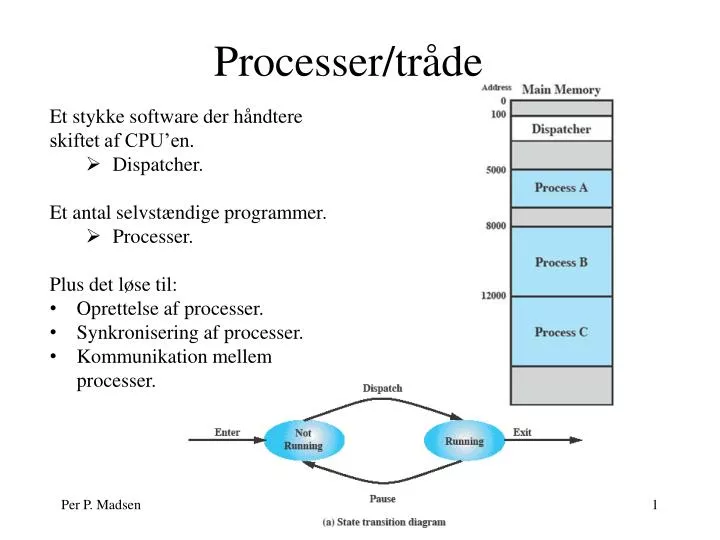
Processer/tråde • Et stykke software der håndtere skiftet af CPU’en. • Dispatcher. • Et antal selvstændige programmer. • Processer. • Plus det løse til: • Oprettelse af processer. • Synkronisering af processer. • Kommunikation mellem processer.
Proces.Et program der eksekveres. En ressource enhed. • Egen memory. • Egen status for filer. • Egen protection ID. • Administrative data fx. Start tid, Forbrugt CPU-tid osv. • Samt alle alm ting som egen stak, programstatus, CPU’registre, Prioritet Styresystemer og tjenester
Processer/tråde Dispatcher: Et lille progran der skifter til den næste tråd, gør evt. brug af schedulerings algoritmen. Styresystemer og tjenester
Processer/tråde Styresystemer og tjenester
Processer/tråde Styresystemer og tjenester
Proces control blok Styresystemer og tjenester
Proces hieraki • UNIX/LINUX: • En proces er barn af den proces der opretter den. • Processen init fødes ved boot. Alle andre er derfor efterkommere efter init. • Prøv evt. Kommandoen pstree. • Windows: • Ingen hieraki dog får forældre processen en handle til barnet. Styresystemer og tjenester
Proces oprettelse • Boot time: • Init opretter alle de nødvendige processer for at operativsystemet kommer op at køre. • Brug af fork()(UNIX/LINUX) eller CreateProcess(...) (Windows) systemkaldene. • En shell afvikler et program. • Et program/proces oprette en ny proces. • Batch job: • Jobs der står i kø som operativsystemet afvikler efter en bestemt politik. Styresystemer og tjenester
Simpel shell #include <stdio.h> #include <sys/types.h> #include <unistd.h> #include <sys/wait.h> int main (int argc, char *argv[]) { int status, pid; char kommando[80]; while (1) { printf("ppmshell>"); scanf("%s",kommando); pid = fork(); if (pid != 0) while(wait(&status) != pid); else execlp(kommando, (char *)NULL); } } Styresystemer og tjenester
EXEC #include <unistd.h> int execlp( const char *file, /* program name */ const char *arg0, /* first arg (file name) */ const char *arg1, /* second arg (if needed) */ ..., /* remaining args (if needed) */ NULL /* arg list terminator */ ); /* Returns -1 on error (sets errno) */ execlp("echo", "echo", "haj", "du.", NULL); Styresystemer og tjenester
EXEC int execl(const char *path, const char *arg0, const char *arg1,..., NULL); int execlp(const char *file, const char *arg0, const char *arg1,..., NULL); int execle(const char *path, const char *arg0, const char *arg1,..., NULL, char *const envv[]); int execv(const char *path,char *const argv[]); int execvp(const char *file, char *const argv[]); int execve(const char *path, char *const argv[], char *const envv[]); Styresystemer og tjenester
Software interrupts: Signals Styresystemer og tjenester
#include <stdio.h> #include <sys/types.h> #include <unistd.h> #include <sys/wait.h> #include <signal.h> void slut () {printf(" -- Så er det slut\n"); exit(0);} intmain (int argc, char *argv[]) { int status, pid; char kommando[80]; signal (SIGINT, slut); while (1) { printf("ppmshell>"); scanf("%s",kommando); pid = fork(); if (pid != 0) while(wait(&status) != pid); else execlp(kommando, (char *)NULL); } } Simpel shell Styresystemer og tjenester
Software interrupts: Realtime Clock #include <sys/types.h> #include <time.h> #include <sys/time.h> #include <signal.h> struct timeval tv; struct itimerval sample_time; struct sigaction sa; void sampel_pc () { // gør noget } sample_time.it_interval.tv_sec = 0; sample_time.it_interval.tv_usec = 100000; sample_time.it_value.tv_sec = 0; sample_time.it_value.tv_usec = 100000; /* Install timer_handler as the signal handler for SIGVTALRM. */ memset (&sa, 0, sizeof (sa)); sa.sa_handler = &sampel_pc; sigaction (SIGALRM, &sa, NULL); setitimer (ITIMER_REAL, &sample_time, ((struct itimerval *) 0)); while (1) sigpause (0); Styresystemer og tjenester
Short-Term Schedulering/dispatching • Dispatcheren startes af: Hardware: • Clock interrupts • I/O interrupts Kørendeproces/tråd. • Operating system kald • Signals (e.g., semaphores) Styresystemer og tjenester
Preemptive/Nonpreemptive • Nonpreemptive: Når en proces køre fåe den lov at køre til den selv giver afkald på CPU’en. • Preemptive: En proces kan blive afbrugt på et vilkårligd tidspunkt, som følge af et HW-interrupt. Styresystemer og tjenester
w = Ventetid • e = Eksekveringstid • s = Total eksekveringstid tid for proces, Styresystemer og tjenester
First-Come-First-Served (FCFS) • Simplest scheduling policy • Also known as first-in-first-out (FIFO) or a strict queuing scheme • When the current process ceases to execute, the longest process in the Ready queue is selected • Performs much better for long processes than short ones • Tends to favor processor-bound processes over I/O-bound processes
Round Robin • Uses preemption based on a clock • Also known as time slicing because each process is given a slice of time before being preempted • Principal design issue is the length of the time quantum, or slice, to be used • Particularly effective in a general-purpose time-sharing system or transaction processing system • One drawback is its relative treatment of processor-bound and I/O-bound processes
Shortest Process Next (SPN) • Nonpreemptive policy in which the process with the shortest expected processing time is selected next • A short process will jump to the head of the queue • Possibility of starvation for longer processes • One difficulty is the need to know, or at least estimate, the required processing time of each process • If the programmer’s estimate is substantially under the actual running time, the system may abort the job
Shortest Remaining Time (SRT) • Preemptive version of SPN • Scheduler always chooses the process that has the shortest expected remaining processing time • Risk of starvation of longer processes • Should give superior turnaround time performance to SPN because a short job is given immediate preference to a running longer job
Highest Response Ratio Next (HRRN) • Chooses next process with the greatest ratio • Attractive because it accounts for the age of the process • While shorter jobs are favored, aging without service increases the ratio so that a longer process will eventually get past competing shorter jobs
Schedulering. Linux Real-time FIFO. Real-time Round Robin. Alm. Threads og processer. Real-Time prioriteter 0 – 99. Kun SuperUser Alm. prioriteter 100 – 139. Default 120 (nice) nice(0) ~ 120 (Default). nice(1) – nice(19): Nedprioritering fx baggrunds job. nice(-1) – nice(-20): Kun SuperUser. Styresystemer og tjenester
Schedulering af alm. threads og processer Tidskvant tilskrevet en proces/tråd, når den forrige er opbrugt: Tidskvant = (140 – Statisk prioritet) * 20 for Statisk prioritet < 120 (140 – Statisk prioritet) * 5 for Statisk prioritet >= 120 Dvs: nice(-20) ~ 800 mS, nice(0) ~ 100 mS nice(19) ~ 5 mS Dynamisk prioritet: Hvem skal til først ? Dyn. prioritet = max(100, min(sta. prioritet – bonus + 5, 139)) Styresystemer og tjenester
Schedulering. Windows Styresystemer og tjenester
Schedulering. Windows Styresystemer og tjenester