Download
1 / 12
120 likes | 136 Views
A sequence of outer integration steps based on inner simulator and estimation methods for accuracy and stability. Projective methods in time involve detailed simulation for short periods and extrapolate forward. Coarse projective integration accelerates processes. Stabilizing unstable systems with feedback control design.

E N D
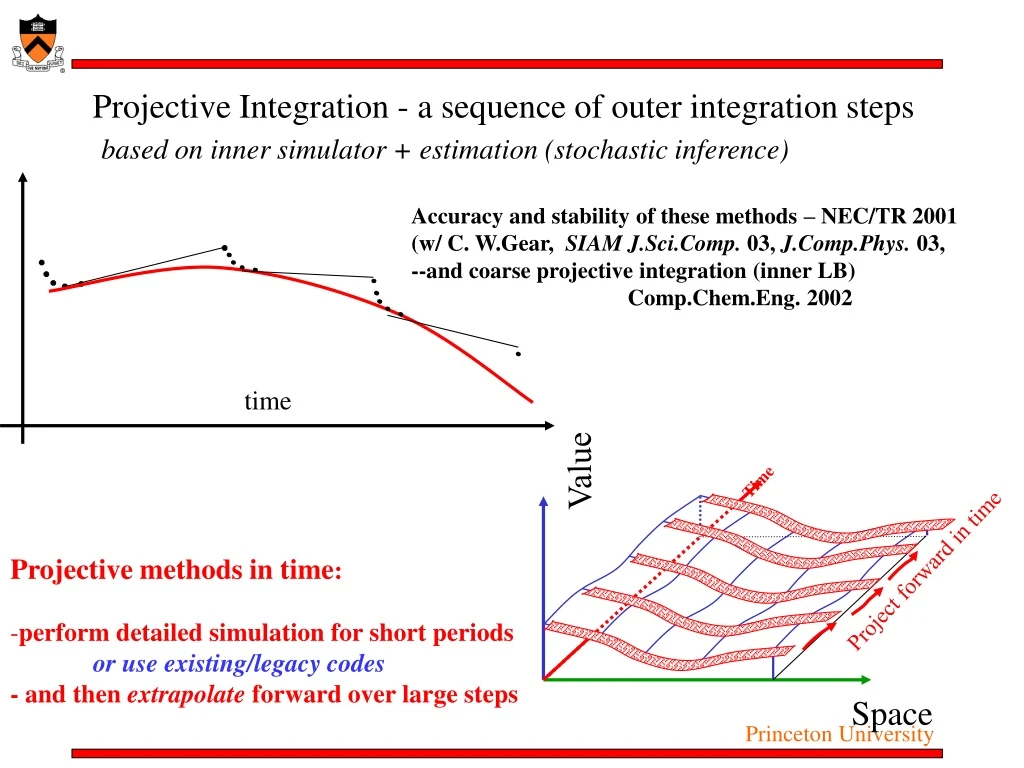
Value Time Project forward in time time Space Projective Integration - a sequence of outer integration steps based on inner simulator + estimation (stochastic inference) Accuracy and stability of these methods – NEC/TR 2001 (w/ C. W.Gear, SIAM J.Sci.Comp. 03, J.Comp.Phys. 03, --and coarse projective integration (inner LB) Comp.Chem.Eng. 2002 • Projective methods in time: • perform detailed simulation for short periods • or use existing/legacy codes • - and then extrapolate forward over large steps
Microscopic Simulator Microscopic Simulator Projection [α1,…αns](k+1) [α1,…αns](k+2) [α1,…αns](k+2+M) [α1,…αns](k) Coarse projective integration: Accelerating things Simulation results at g = 35, 200,000 agents Run for 5x03 t.u. Project for 5x0.3 t.u.
Estimate matrix-vector product Matrix free iterative linear algebra The World THE CONCEPT: What else can I do with an integration code ? Have equation Do Newton Write Simulation Compile Do Newton on Also CG, GMRES Newton-Krylov
The Bifurcation Diagram Tracing the branch with arc-length continuation
STABILIZING UNSTABLE M*****S Feedback controller design We consider the problem of stabilizing an equilibrium x*, p* of a dynamical system of the form where f andhence x* is not perfectly known To do this the dynamic feedback control law is implemented: Where w is a M-dimensional variable that satisfies Choose matricesK, D such that the closed loop system is stable At steady state: and the system is stabilized in it’s “unknown” steady state In the case under study the control variable is the exogenous arrival frequency of “negative” information vex- and the controlled variables the coefficients of the orthogonal polynomials used for the approximation of the ICDF
STABILIZING UNSTABLE M*****S Control variable: the exogenous arrival frequency of “negative” information vex-
So, again, the main points • Somebody needs to tell you what the coarse variables are • And then you can use this information to bias the atomistic simulations “intelligently” accelerating the extraction of information In effect: use numerical analysis algorithms as protocols for the design of experiments with the atomistic code
and now for something completely different: Little stars ! (well…. think fishes)
Fish Schooling Models Initial State Position, Direction, Speed INFORMED UNINFORMED Compute Desired Direction Zone of Attraction Rij< Zone of Deflection Rij< Normalize Update Direction for Informed Individuals ONLY Couzin, Krause, Franks & Levin (2005) Nature (433) 513 Update Positions
INFORMED DIRN STICK STATES STUCK ~ typically around rxn coordinate value of about 0.5 INFORMED individual close to front of group away from centroid
INFORMED DIRN SLIP STATES SLIP ~ wider range of rxn coordinate values for slip 00.35 INFORMED individual close to group centroid