Download
1 / 30
300 likes | 490 Views
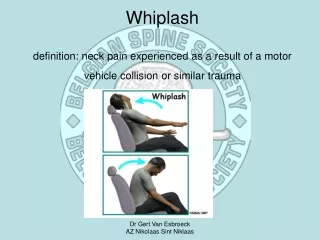
Headrest Whiplash Reducer. Bo Huang Danish Nagda. CREATION OF WHIPLASH. Completely Forward Extended Head-Neck Position during collision. Completely Backward Extended Head-Neck Position during collision. Initial Head-Neck Position before vehicle collision. BACKGROUND INFORMATION.

E N D
Headrest Whiplash Reducer Bo Huang Danish Nagda
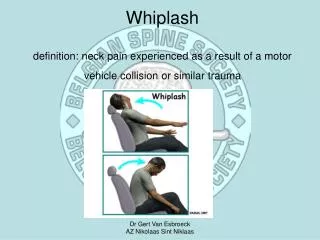
CREATION OF WHIPLASH Completely Forward Extended Head-Neck Position during collision Completely Backward Extended Head-Neck Position during collision Initial Head-Neck Position before vehicle collision
BACKGROUND INFORMATION • Causes of Whiplash • Parts of the body affected • Prevention measures already in place • The Long Term effects • Allergy • Breathing, Digestive, and Cardiovascular Disorders • Hypertension, and Low Back Pain
BACKGROUND STATISTICS • Case-control study of 700+ people with neck injuries • Examined attribution of MVC to chronic neck pain • 45% attributed neck injury to whiplash
BACKGROUND STATISTICS • Study of 1,133 random people in Quebec • Determined number of neck injuries due to MVC • 15.9% reported history of neck injury from MVC • Associated illness with history of MVC • Disabling neck pain – 9.9 % MVC, 3.9 % no MVC • Headaches – 33 % MVC, 15.2 % no MVC • Depression – 32.8 % MVC, 19.3 % no MVC
Problem Statement: It is possible to reduce the level of neck injury in a Motor Vehicle Accident by varying different parameters.
Parameters • Distance between Neck Headrest • Speed of forward and backward movement • Height of headrest • Seat angle • Velocity of Car
RANGE OF MOTION • Minimize backward motion of the head/neck • Direct correlation between range of motion and whiplash • Movement of headrest to reduce range of motion • Movement of headrest determined by IR sensor
Flexible design • Accounts for adult male or female • Passengers as well as driver • Different Vehicle Types can utilize this system
CIRCUIT LAYOUT • Many different designs were tried and implemented for this project • Ultrasound with FPGA, buffer circuit • IR with FPGA, PICC, low-pass filter circuit • IR with FPGA, A/D converter, low-pass filter • IR with FPGA, Comparator, low-pass filter
POSSIBLE DESIGNS Ultrasound with FPGA, buffer circuit • Disadvantages • The output from the ultrasound sensor was • Variable according to surface of object • Greatly affected by movement • Bad-input range – 24V • Detecting distance inaccurate
POSSIBLE DESIGNS IR with FPGA, PICC, low-pass filter circuit • Disadvantages • The PICC was to be used for a/d conversion and pre-processing • Very inaccurate results when comparing the two signals digitally
POSSIBLE DESIGNS IR with FPGA, PICC, low-pass filter circuit • Disadvantages • The PICC was to be used for a/d conversion and pre-processing • Very inaccurate results when comparing the two signals digitally
POSSIBLE DESIGNS IR with FPGA, A/D converter, low-pass filter Disadvantages • A/D converter logic was too complex for our project needs • FPGA would have to have a complicated state machine
FINAL DESIGN IR with FPGA, Comparator, low-pass filter • Advantages • IR output is stable and variable with distance • Comparator allows for easy analog threshold comparison • Motor input is clear and accurate
EQUIPMENT • Infrared Sensor • Microprocessor • Low-Voltage Stepper Motor • Stepper Motor Driver
INFRARED SENSOR • Utilized to detect the distance between the headrest and head • Variable output voltage • inversely proportional to distance • Range: 2-3V • Distance range • 4 - 30 cm
INFRARED SENSOR • ADVANTAGES • Less influence on the color of reflective objects – Works for all surfaces • Distance output type – Analog • Detecting Distance – 4 to 30 cm • External control circuit was unnecessary • Steady, controlled output
COMPARATOR • Comparator compares the sensor input to a controlled threshold value • Takes in variable sensor input • Compares it to threshold value set through testing • Outputs a digital high when the value is larger than threshold
MICROPROCESSOR • FPGA XSA-100 was used to run the motor with digital input • System is triggered • Input comparator data • Digital input is processed • Motor is sent an impulse to turn 7 ½ degrees per negative edge trigger
LOW-VOLTAGE STEPPER MOTOR • Unipolar Stepper Motor (PF55-48C5) by Alltronics • 12VDC, 7.5 Degrees per step, 48 steps/revolution, single phase, two phase, or half-step • Ran in two phase mode in our project • Best compromise of startup torque and maximum speed.
Motor Driver • Each “step” energizes different windings to advance the motor • Allows precise control over both motor Speed and Total Rotations
Trigger Point Deceleration Acceleration Trigger point
ANALYSIS • Rise time is critical to the functionality of the system. • Stepper motor used: ~100 ns rise time • Torque decreases as speed increases • To achieve our torque requirements, max motor speed was only 3 turns/sec (9cm/sec)
IMPROVEMENTS • Inputs in more than one axis • Flexible Headrest • Connected to Accelerometer in the car • More powerful motor • More efficient mechanical power transfer
Improvements • Real vs. Miniature • Real-life testing • Using Ultrasound Sensor • Design taking into account air bags • Pressure sensor on headrest
Conclusion • A variation of this type of system is the future in whiplash injury prevention. Our system was a much simplified model and took in a lot less inputs in comparison to an a real-life model