Download
1 / 29
310 likes | 579 Views
Cinematica y mecanica de placas (I). Movimientos de las placas. Movimientos relativos: movimiento de una placa con respecto a otra placa que se considera fija.

E N D
Movimientos relativos: movimiento de una placa con respecto a otra placa que se considera fija Movimientos absolutos: movimiento de una placa con respecto a un sistema de coordenadas de referencia fijo: p. ej. World Geodetic System 1984 (WGS84); International Terrestrial Reference Frame (ITRF)
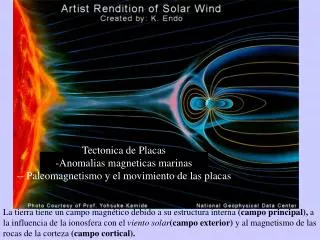
Teorema de Euler: Cualquier movimiento en la superficie de una esfera puede describirse por medio de una rotación por un eje (linea) pasando por por el centro de aquella esfera. Las líneas de flujo del movimiento de las placas son a lo largo de latitudes (pequeños círculos) con respecto al polo de rotación relativo.
Asumiendo que la placa A sea fija, para definir la rotación relativa de la placa B es necesario especificar: • Ubicación del polo de rotación relativo (polo Euleriano) E, (en latitud y longitud). • La velocidad de rotación (velocidad angular) w de una placa con respecto a la otra (en radiantes por millón de años, o grados por millón de años).
Como varía la V en las dorsales (o trincheras): La velocidad de divergencia (o de convergencia) lineal depende de la distancia angular del polo de rotación relativo. La velocidad es máxima en los puntos a 90° del polo de rotación relativa (equator).v = wR sin q donde:= velocidad angular de la placa B con respecto a la placa A ( en radiantes / m.y.)R = radio de la Tierra= distancia angular de un punto en la dorsal respecto al polo (en grados)
Euler Pole ¿Que representan las fallas transformantes? Para evitar convergencia o divergencia, las fallas transformantes deben estar a lo largo de pequeños círculos (círculos de latitud) acerca del polo de rotación relativa P (Polo euleriano). Corolario: Perpendicularmente a las fallas transformes existe una longitud que pasa por P. De hecho esta es una de las manera con que se localizan los polos de rotación.
¿Como se estima el movimiento de las placas? La posición del polo euleriano se deduce a partir de • Orientación de las fallas transformantes • Orientación de las dorsales oceánicas (pero no siempre son perpendiculares al movimiento) • Orientación del movimiento a lo largo del plano de falla en los márgenes de placas, estimado a partir de los mecanismos focales de temblores La velocidad angular se deduce a partir de • Velocidad de separación de las dorsales oceánicas • Desplazamiento de objetos geológicos con edad conocida y que se formaron a lo largo de límites transformes.
Determinación del polo Euleriano por medio de las fallas transformantes
Margen de incertidumbre en la determinación del polo Euleriano
Edad del piso oceánico (y velocidad de separación) derivada de las anomalías magnéticas
El poder predictivo de la Tectónica de Placas En los años 60’ se descubrío y mapeó una dorsal oceanica afuera de Oregon y Whashington. Tambien se conocía la Falla de San Andrés
Sin embargo se desconocía si existía un límite de placas en la costa occidental de EEUU al norte del cabo Mendocino Una vez aceptada la Tectónica de Placas se pudo predecir el tipo de limite de placa y la V relativa con una simple suma vectorial
Movimiento absoluto de las Placas de acuerdo a datos geológicos
PLATE MOTION CALCULATOR http://sps.unavco.org/crustal_motion/dxdt/model
El movimiento de las placas actuales por medio de la geodesia satelital: el sistema GPS
Velocidades absolutas actuales de las placas a partir de datos GPS
Velocidades absolutas actuales de las placas a partir de datos GPS http://jules.unavco.org/Voyager/Earth?grd=0&pre=dxdt&gmt=52&vel=1036&opt=8
Comparación entre velocidades absolutas de las placas a partir de datos GPS y del modelo NUVEL1a http://sps.unavco.org/crustal_motion/dxdt/
Tasa de deformación de las placas en base a los datos GPS http://sps.unavco.org/crustal_motion/dedt/