Download
1 / 31
310 likes | 432 Views
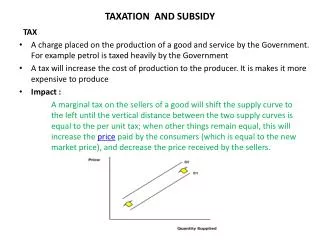
Group Strategyproofness and No Subsidy via LP-Duality. By Kamal Jain and Vijay V. Vazirani. Abstract. In this article Jain and Vazirani introduce a fairness criterion on service providers, which they call “No Subsidy”

E N D
Group Strategyproofness and No Subsidy via LP-Duality By Kamal Jain and Vijay V. Vazirani
Abstract In this article Jain and Vazirani introduce a fairness criterion on service providers, which they call “No Subsidy” In their second result they give budget balanced and group strategyproof cost sharing method for cost function that is neither submodular nor supermodular
Cost function C(S) denotes the cost incurred by the company to serve the users in S. S U, U – all the customers (users) of the company. Each user, i, has utility ui’ for receiving the news. User i enjoys benefit of ui’ – xi. Each user may misreport this utility as some other number ui For the rest of discussion, utility of user i is ui Definitions
Definitions (cont.) • A cost sharing mechanism determines which user receive service and at what price. • A cost sharing method is a function ξ which distributes the cost of the service between users receiving it.
The cost sharing method is cross monotonic if iQ, Q R ξ(Q,i) ξ(R,i) It is weakly cross monotonic if Q R iQ ξ(Q,i) iQ ξ(R,i)
Definitions (cont.) • More formally, ξ takes two arguments, a set of users Q and user i, and returns a non-negative real number, satisfying • If i Q, then ξ(Q,i) = 0 • Else, iQ ξ(Q,i) = C(Q) , where C(Q) represents the cost of serving the Q (not necessary the optimal cost)
The Model Jain and Vazirani use example of service provider company that broadcasts news on the net. Consider graph G = (V, E), with edge weights ce and marked node root (service provider). Other nodes are users. Messages are sent using multicasting. Each message can be duplicated at any node at no cost. Edge e charges ce to transfer message from one end to other. The cost of broadcasting a message is total price charged by the edges.
The Model (cont.) Each edge assumed to be of infinite capacity, so the message can be sent through the shortest path. Hence we can assume that ce satisfy the triangle inequality
All users report their utilities ui and now provider should decide about three things: • A set Q of users, selected to receive a message • A tree T containing Q to broadcast the message • For each user i, the price xi to be charged as a cost of delivering the message
Computational constraint • Decisions should be made in polynomial time
Economic constraints • Optimum • No Positive Transfers (NPT) • Voluntary Participation (VP) • Consumer Sovereignty (CS) • Budget-balance (BB) • Efficiency • Group Strategyproof
But… The first constraint can’t be met unless P = NP It is also impossible to find strategyproof mechanism that is both budget balanced and efficient, so we drop efficiency. Other constraints can be captured by a cross monotonic sharing method (Moulin and Shenker)
For every cross monotonic cost sharing method Moulin and Shenker give a mechanism M(ξ) which computes Q and xi = ξ(Q,i) : • Q is initialized to U • If user iQ and ui < ξ(Q,i) , then drop i from Q. Keep repeating this step in arbitrary order until no such user found • Set xi = ξ(Q,i)
Theorem 1 (Moulin and Shenker) For any cross monotonic cost sharing method ξ , the mechanism M(ξ) is budget balanced, meets NPT, VP, CS and is group strategyproof. Theorem 2 (Moulin and Shenker) Suppose U is the set of all users and C: 2UR+ is a submodular cost function. If a cost sharing mechanism is budget balanced, meets NPT, VP, CS and is group strategyproof then it is equivalent to M(ξ) for some cross monotonic cost sharing method, ξ.
No Subsidy condition If Q is the set of users selected to receive the service and xi is the cost of service asked from user i, then for any R Q, iR xiC(R) Where C(R) is the cost of serving R
No Subsidy (cont.) Budget balanced, NPT, VP, CS and group strategyproof cost sharing mechanism is not necessary no subsidy : Users a and b with utilities ua and ub. Cost function: C() = 0; C(a) = C(b) = 1; C(a,b) = 3
Fractional set A fractional setSf is a set S and function f : S [0,1] (for each element e of S, f tells “which part of e is in S”) Union of two fractional sets S1f1 S2f2 is S1S2 with function f = min (f1 + f2, 1) Fractional sets S1, S2, … SncoverS if S1S2 … Sn = S
Covering property Cost function C is said to exhibit the covering property if for any set S of users and for any covering of S = jfj Sj C(S) j fj C(Sj) Where each Sj is set of users
The theorem Suppose U is the set of all users and C: 2U R+ is a cost function. There is a cost sharing mechanism which satisfies budget balance, meets NPT, VP, CS and also satisfies the No Subsidy condition if and only if C exhibits the covering property.
Proof • Lemma 1:Suppose U is the set of all users and C: 2U R+ is a cost function. There is a budget balanced, NPT,VP, CS and No Subsidy cost sharing mechanism if and only if there is a weakly cross monotonic cost sharing method • Lemma 2: Suppose U is the set of all users and C: 2U R+ is a cost function. There exist a weakly cross monotonic cost sharing method for C if and only if C exhibits the covering property.
1. The theorem follows from the two lemmas 2. From lemma 1 and from Moulin and Shenker theorem 2 follows that if C is submodular function and a cost sharing mechanism is BB, NPT, VP, CS and is group strategyproof, then it satisfies No Subsidy condition too. 3. From the theorem and from Moulin and Shenker theorem 1 follows that submodular functions are subclass of functions that exhibit the covering property.
The cost sharing method • In this section, a costsharing method for multicasting is presented. It achieves budget balance and is crossmonotone, and for any set Q of users chosen for distribution, finds a tree of cost at most twice the optimal Steiner tree containing the root and users Q. • The method utilizes two facts: • If the edge costs satisfy the triangle inequality, the cost of a minimum spanning tree on the set of required vertices is within twice the cost of an optimal Steiner tree containing all required vertices. (Kou, Markowsky, Berman) • There is an exact linear programming relaxation for the minimum spanning tree problem, i.e., a relaxation that always has optimal integral solutions. (Edmonds)
In minimum branching problem, we are given a directed graph with nonnegative costs on the directed edges, and one of the vertices is marked as root. The problem is to find a minimum cost tree containing all vertices and directed into the root. The transformation from the minimum spanning tree problem in an undirected graph to the minimum branching problem is straightforward. Simply replace each undirected edge e of G by two directed edges each of cost of e , and ask for a minimum cost branching directed into the root. Let us denote this directed graph by H = (V, E’) S V is valid if it is non-empty and does not contain root Let (S) = { (uv) E’ | u S and v S} and F(S) = { (uv) E’ | F E’, u S and v S}
LP relaxation: Minimize eE’ cexe Subjectto e| e (S) xe 1, valid setS xe 0, e E’ DLP: Maximize (valid set S)yS Subjectto S | e (S) yS ce , e E’ yS 0, valid setS LP relaxation
Edge efeels dual yS if yS > 0and e (S).Edge e is tight if the total amount of dual it feels equals its cost. The dual program is trying to maximize the sum of the dual variables yS subject to the condition that no edge feels more dual than its cost, i.e., no edge is overtight. Set S V is unsatisfied if it is valid and F(S) = Any minimal unsatisfied set is said to be active
Algorithm(minimum branching) • (Initialization) F ; for each S V, yS 0 • (Edge augmentation) While there exists an unsatisfied set do: Find all active sets w.r.t. F . For each such set S, raise its dual variable yS until some edge e goes tight; F F {e} • Let e1, e2, … el be the ordered list of edges in F. • (Reverse delete) For j = l downto 1 do: If there are no unsatisfied sets w.r.t. F – {ej}, then F F {ej} • Return F • For every valid S such that yS > 0 | F(S) | = 1 • eFce = (valid set S)yS
Given a set Q of recipients, the Algorithm is used to find a minimum spanning tree containing Q and the root. The costsharing method, ξ, simply distributes each raised dual equally among all vertices contained in this dual. So, the amount charged to user i is ξ (Q, i) = (valid set S)(yS / |S|) For this costsharing method ξ, the mechanism M(ξ) is budget balanced, meets NPT, VP, CS, is group strategyproof, and satisfies No Subsidy.
Appendix 1 • Cost function is submodular if 1. C() = 0 2. Q1 , Q2 (subsets of users): C(Q1) + C(Q2) C(Q1Q2) + C(Q1Q2) • Cost function is supermodular if the second condition is reversed
Appendix 2 • Cost sharing mechanism is budget balanced if the total amount it charges from the receivers S is same as C(S). • It is efficient if it maximizes over all possible S, the sum of the utilities of users in S minus C(S) • It is strategyproof if the dominant strategy of each user is to reveal the true value of his utility. • It is group strategyproof if it holds for coalitions.
Appendix 3 LP is min <c, x> subject to Ax b x 0 c, x – vectors in Rn b – vector in Rm A – matrix n x m DLP is max <b, y> subject to yA c y 0
Appendix 3 (cont.) Duality theorem If LP has a solution then DLP has a solution and: min <c,x> = max <b,y>