Download
1 / 1
10 likes | 224 Views
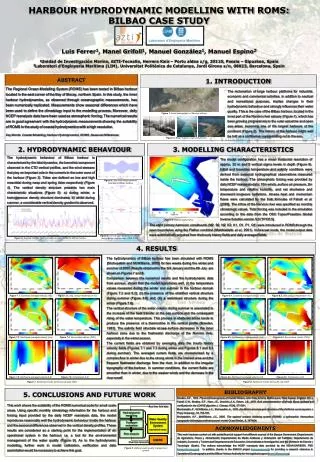
Figure 1: Real-life examples of rigid and nonrigid visual changes resulting from: i) moving observer (top row) ; ii) animate object (bottom row). NonRigid transformation (0 °). NonRigid transformation (20 ° CW). Rigid transformation (0 °). Rigid transformation (20 ° CW). Learned motion.

E N D
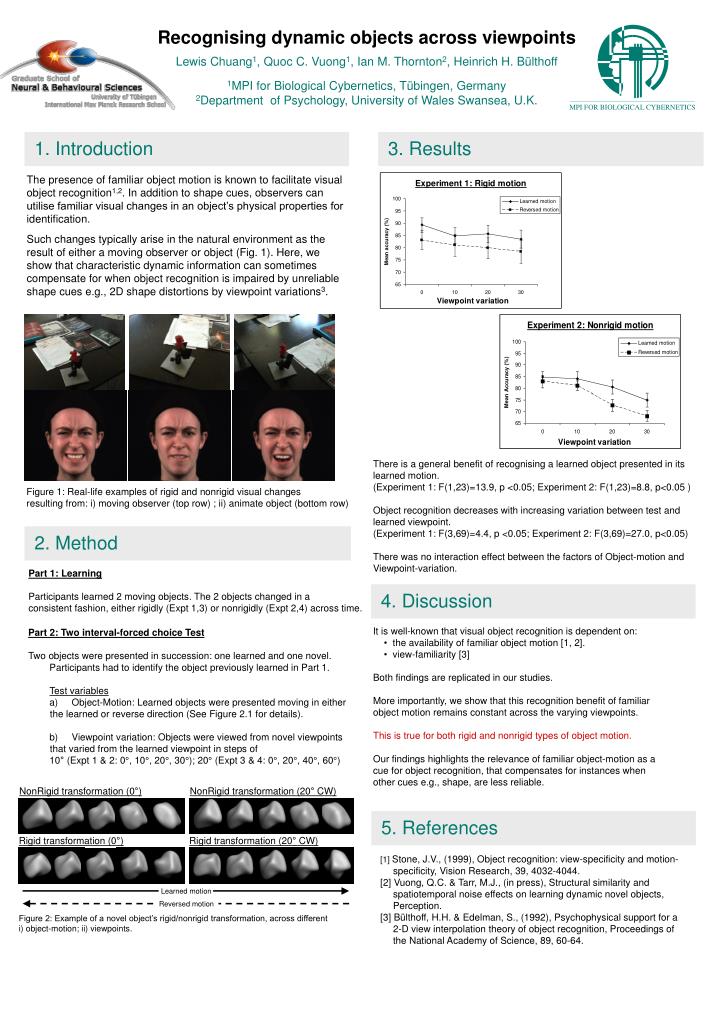
Figure 1: Real-life examples of rigid and nonrigid visual changes resulting from: i) moving observer (top row) ; ii) animate object (bottom row) NonRigid transformation (0°) NonRigid transformation (20° CW) Rigid transformation (0°) Rigid transformation (20° CW) Learned motion Reversed motion Recognising dynamic objects across viewpoints Lewis Chuang1, Quoc C. Vuong1, Ian M. Thornton2, Heinrich H. Bülthoff 1MPI for Biological Cybernetics, Tübingen, Germany 2Department of Psychology, University of Wales Swansea, U.K. MPI FOR BIOLOGICAL CYBERNETICS 1. Introduction 3. Results The presence of familiar object motion is known to facilitate visual object recognition1,2. In addition to shape cues, observers can utilise familiar visual changes in an object’s physical properties for identification. Such changes typically arise in the natural environment as the result of either a moving observer or object (Fig. 1). Here, we show that characteristic dynamic information can sometimes compensate for when object recognition is impaired by unreliable shape cues e.g., 2D shape distortions by viewpoint variations3. There is a general benefit of recognising a learned object presented in its learned motion. (Experiment 1: F(1,23)=13.9, p <0.05; Experiment 2: F(1,23)=8.8, p<0.05 ) Object recognition decreases with increasing variation between test and learned viewpoint. (Experiment 1: F(3,69)=4.4, p <0.05; Experiment 2: F(3,69)=27.0, p<0.05) There was no interaction effect between the factors of Object-motion and Viewpoint-variation. 2. Method Part 1: Learning Participants learned 2 moving objects. The 2 objects changed in a consistent fashion, either rigidly (Expt 1,3) or nonrigidly (Expt 2,4) across time. 4. Discussion • It is well-known that visual object recognition is dependent on: • the availability of familiar object motion [1, 2]. • view-familiarity [3] • Both findings are replicated in our studies. • More importantly, we show that this recognition benefit of familiar • object motion remains constant across the varying viewpoints. • This is true for both rigid and nonrigid types of object motion. • Our findings highlights the relevance of familiar object-motion as a • cue for object recognition, that compensates for instances when • other cues e.g., shape, are less reliable. Part 2: Two interval-forced choice Test Two objects were presented in succession: one learned and one novel. Participants had to identify the object previously learned in Part 1. Test variables a) Object-Motion: Learned objects were presented moving in either the learned or reverse direction (See Figure 2.1 for details). b) Viewpoint variation: Objects were viewed from novel viewpoints that varied from the learned viewpoint in steps of 10° (Expt 1 & 2:0°, 10°, 20°, 30°); 20° (Expt 3 & 4: 0°, 20°, 40°, 60°) 5. References [1] Stone, J.V., (1999), Object recognition: view-specificity and motion-specificity, Vision Research, 39, 4032-4044. [2] Vuong, Q.C. & Tarr, M.J., (in press), Structural similarity and spatiotemporal noise effects on learning dynamic novel objects, Perception. [3] Bülthoff, H.H. & Edelman, S., (1992), Psychophysical support for a 2-D view interpolation theory of object recognition, Proceedings of the National Academy of Science, 89, 60-64. Figure 2: Example of a novel object’s rigid/nonrigid transformation, across different i) object-motion; ii) viewpoints.