Download
1 / 12
140 likes | 882 Views
CINEMATIQUE. nous obtenons. De. Similairement,. De ceux-ci on peut démontrer. 2 m/s. 10m/s. Prends axes orientés, axe y etc. 1m. +20m. Mouvements à une dimension. MRUA: M ouvement R ectiligne U niformément A ccéléré Signifie accélération constante. P. 4-21. CINEMATIQUE.

E N D
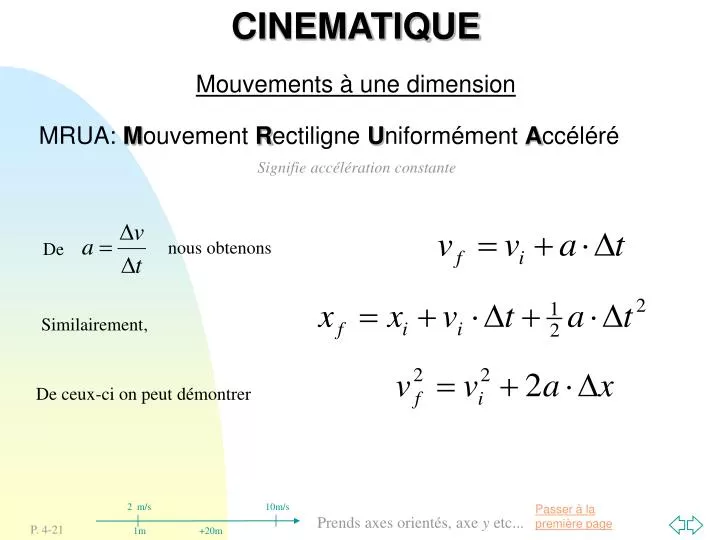
CINEMATIQUE nous obtenons De Similairement, De ceux-ci on peut démontrer 2 m/s 10m/s Prends axes orientés, axe y etc... 1m +20m Mouvements à une dimension MRUA: Mouvement Rectiligne Uniformément Accéléré Signifie accélération constante P. 4-21
CINEMATIQUE Mouvements à une dimension Une chute libre à la verticale est une trajectoire influencé seulement par l’accélération gravitationnelle g = (-) 9.8 m/s2 En adoptant l’axe y conventionnelle, les équations cinématiques deviennent, Exemples. Prv t_up = t_down. Chute d’un édifice, graphe y(t). Fusé a=2g pour 1 min, chute libre ensuite.
CINEMATIQUE y x Mouvements à Deux dimensions La position en fonction du temps peut être représenté paramétriquement par le vecteur position ou le point de l’espace. Génère la trajectoire. Déplacements = … ? Exemples paramétriques dans la TI, t+sin[t],1+cos[t], t*cos[t],t*sin[t]
CINEMATIQUE y 1-Longueur de l’arc / temps 2-Longueur du déplacement / temps 3-Déplacement / temps Nous parlerons donc du vecteur vitesse: x Mouvements à Deux dimensions La vitesse moyenne perd son sens. Plusieurs interprétations: Dans ce cas, la « vitesse moyenne » possède deux composantes La norme de ce vecteur est la grandeur de la vitesse. Exemples
CINEMATIQUE De Similairement, l'accélération devient le vecteur vitesse sera aussi en fonction du temps y y x x Exemples Mouvements à Deux dimensions L ’orientation de ce vecteur n’a pas d'interprétation simple Ce vecteur est tangent à la trajectoire
CINEMATIQUE Nous limitions notre étude aux accélérations constantes: Mouvements à Deux dimensions donc... Eg: vi =(1,6), a=(-0.2,-1.6),xi=(0,5) ...
CINEMATIQUE Mouvements à Deux dimensions Pour les chutes libres (néglige résistance de l’air) ax= 0 et ay = -9.8 m/s2 Alors Eg: 60o, vi= 80, Hmax=? Dmax=?, r(t),v(t),a(t),y(x) =?
CINEMATIQUE Cherchons: v en m/s, # tours… RPM, etc vi = 60 km/h Rroue= 30 cm v tjrs parallèle à l’axe S. Ce n’est pas le cas pour a ! s ( MCUA ) Angles, vitesses, accélération angulaires E.g. 1 E.g. 2 Poulies, Transmission d’auto, Satellites...
CINEMATIQUE Angle en rad, deg, tours... Si est en rad, l’arc de cercle est donné par La vitesse tangentielle (moyenne) est La vitesse angulaire est L’accélération angulaire est ( MCUA ) Angles, vitesses, accélération angulaires sf s, t si La vitesse (tangentielle) est alors L’accélération (tangentielle) est alors Eg. De 30o à 45o, r = 4m et t = 0.5 s.
CINEMATIQUE Position angulaire ( en rad, deg ou tours ) ( en rad /s, deg /s ou tours / s ) Vitesse angulaire ( en rad / s2, etc ) Accélération angulaire Mouvement Circulaire Uniformément Accéléré En prenant un système d’axe à une dimensions le long de la circonférence, les équations cinématiques deviennent: Rem: Tous des « scalaires » car à 1 dim. Exemples
CINEMATIQUE at ac Pour petit, le est un vecteur pointant vers le centre du cercle. Ceci génère une accélération vers le centre de rotation et s’appelle l’accélération centripète. Sa grandeur vaut: La résultante de ces accélérations a une direction et est de grandeur : ( MCUA ) Relations entre éléments angulaires et linéaires En coordonnés cartésiennes, la vitesse, et donc l’accélération sont des vecteurs. Si la vitesse angulaire n’est pas constante il y a aussi une accélération tangentielle. Donc en chaque point d’une trajectoire nous avons une accélération centripète ac et une accélération tangentielle at. Exemples
CINEMATIQUE Proportions, Essieu, Engrenage et Courroie r2 r2 r1 r1 Sur un même courroie, les vitesses tangentielles sont les mêmes et les vitesses angulaires sont en proportions Sur un même essieux, les vitesses angulaires sont les mêmes et les vitesses tangentielles sont en proportions