Download
1 / 24
240 likes | 346 Views
XCIV Congresso Nazionale SIF Genova , 22-27 Settembre 2008. A gradiometric measurement of G. V. Iafolla, E. Fiorenza, C. Lefevre, S. Nozzoli, R. Peron, M. Persichini, A. Reale, F. Santoli Istituto di Fisica dello Spazio Interplanetario (IFSI/INAF), Roma, Italy. Gundlach et al.

E N D
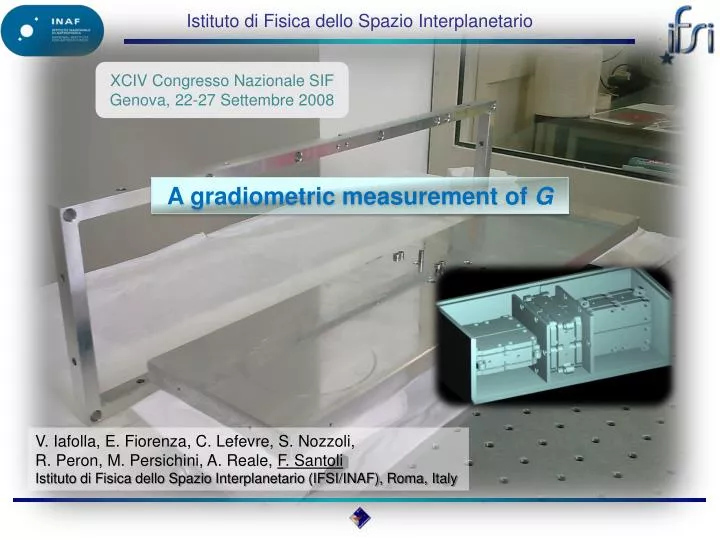
XCIV Congresso Nazionale SIF Genova, 22-27 Settembre 2008 A gradiometric measurement of G V. Iafolla, E. Fiorenza, C. Lefevre, S. Nozzoli, R. Peron, M. Persichini, A. Reale, F. Santoli Istituto di Fisica dello Spazio Interplanetario (IFSI/INAF), Roma, Italy
Gundlach et al. Current knowledge of G Current experimental results for G are characterized by very small errors, but with big discrepancies among the various results: Last “best” measurement: with a relative uncertainty: Gundlach, J. H. and Merkowitz, S.M. Phys. Rev. Lett. 85, 2869-2872 (2000) However, the values obtained in the various experiments differ one from the other by more than 600 ppm
Gundlach et al. Current knowledge of G The currently recommended value of G by CODATA is: with a relative uncertainty: The discrepancies in the results for G of the various experiments are a proof of the presence of significant systematic errors in the experiments, as well as of the difficulty in carrying out the experiment. This also stresses the importance of the use of different techniques in measuring G. The difficulties of the measurement of G are related with the smallness of the gravitational effects, to the presence of spurious effects (vibrational, thermal, electromagnetic), as well as to the implementation of the required metrological precision.
Current knowledge of G Torsion balances The test bodies are attached at the opposite ends of a horizontal beam which is suspended with a wire from its midpoint. Any force acting differently on the test masses and perpendicular to the plane formed by the beam and the wire, gives rise to a non zero net torque which will twist the wire by an angle proportional to the differential force itself.
Current knowledge of G Why measuring G ? (the locally measured gravitational constant GL) • G represents a fundamental constant of Nature both in Newton theory as well as in Einstein’s Geometrodynamics • G enters in several mathematical expressions with other fundamental constants (G is a conversion factor…) • One very important problem in modern physics is to know whether the quantities known as constants in Nature (G, c, h, e, …) can vary with time or not • Indeed, nonstandard theories of gravity predicts both a spatial and a time dependency of G • … No more to say about the importance of G measurements
X Z Y One–axis gravity gradiometer A preliminary experimental work has been performed in order to measure the gravitational (constant) G using a one axis gravity gradiometer • A characteristic of such gradiometer is the detection of the off–diagonal components of the gravity gradient tensor • At the same time the gradiometer rejects the linear acceleration due to the vibrational noise, the so–called Common Mode Rejection(CMR) Al 5056
X Z Y One–axis gravity gradiometer • The test mass is connected to an external reference frame by means of two torsionalarms • The torsion axis is also the symmetry axis of the test mass • The oscillator is sensitive to the rotations of the horizontal plane • The torque produced by the gravity gradient is balanced by the torsional spring of the oscillator Al 5056
X Z Y One–axis gravity gradiometer M gravitational torque signal deflection torsion elastic constant I moment of inertia of the test mass coefficient of dissipation The oscillator works in the region where its transfer function is flat, below the resonance frequency f0: Al 5056
One–axis gravity gradiometer The signal is detected by means of a capacitive transducer in a bridge configuration The bridge is driven by a voltage with high frequency fp trough a transformer The output signal at frequency fr = 10 KHz produced by the unbalancing of the bridge is detected as a modulation of the bias voltage The pick-up system Total torque noise of the oscillator
X Z Y Common mode rejection: CMR • Usually, the rejection is quite difficult with different instruments: we need two equal transfer functions • The rejection is very important because of the vertical seismic noise • Indeed, the limit in the accuracy of measurement is given by the value of the seismic noise on the oscillator around the frequency of the gravitational signal to be detected • Of course, the seismic noise that does apply a torque on the system is not rejected Al 5056
Common mode rejection: CMR A way to obtain CMR is to take two equal accelerometers (with the same transfer function) with their sensitive axis almost parallel to the horizontal plane • In order to obtain the CMR we need to take the difference of the two measurements (time span of about 8 days) • With the one–axis gradiometer the rejection is automatic and the CMR is valid both for the mechanical signal and the thermal one Two equal accelerometers
System parameters: experimental measurements… The main parameters to be measured in the laboratory are: • The system resonance frequency • The mechanical quality factor • The system transfer function (ambient conditions) • The electrical parameters • The transducer factor (calibration) • The seismic noise at the frequencies of interest of the gravitational signal
System parameters: experimental measurements … Transfer function and resonance frequency • The measurement has been performed under vacuum conditions in order to have a higher Q(=3), but low enough in order to excite the system with an electric signal • The experimental value for the frequency is 1.01 Hz Amplitude Phase Q=3 Q=3
System parameters: experimental measurements … Transfer function in ambient conditions • At ambient pressure the oscillator is an overdamped system because of the gas between the capacitor plates • We are interested to measure gravitational signals around 101 Hz, therefore a smaller Q is possible • Again, the system has been excited with an electric signal Amplitude Phase Q=0.1 Q=0.1
ΔV M System parameters: experimental measurements… Calibration procedure for the transducer factor The response of the system is linear
Measurement of the gravitational effect • The rotor is made by suspending a system of two masses on a wire • The one–axis gradiometer detector is placed inside a metallic box in order to provide electric isolation of the system • The sources are two cylinder filled with fused Pb: 29 kg each mass • The frequency of the gravitational signal is twice the rotation frequency of the rotor: in this way noise effects induced by the rotation of the system are avoided The experimental apparatus An electric motor produces the desired rotation Source masses: D = 18 cm H= 11.5 cm
Measurement of the gravitational effect The experimental apparatus In order to maximize the gravitational effect, the two centers-of-mass of the gradiometer (in black) were placed as close as possible to the two sources (in red) Signal Spectrum of the signal Blue = gravitational signal Red = noise of the rotor
Measurement of the gravitational effect Comparison of the experimental results with the theoretical (numerical) predictions Experimental results • Metrological errors: • Masses • Distances Numerical evaluations with a finite elements method
Measurement of the gravitational effect Accuracy of the measurement 5 hours integration time Rotor + signal noise Rotor noise Electronic noise At IFSI laboratory At Gran Sassolaboratory: lower differential noise
Recent results New design for the gradiometer
Recent results Resonance frequency
Conclusions • The one–axis gradiometer is able to measure G with a fractional accuracy of about 104, i.e., 100 ppm • This accuracy is competitive with other measurements in the literature • However, such a result can be reached if and only if all the other parameters entering in the gravitational law are measured with the same accuracy: • 3.1 Homogeneity and density of the masses, their shape • 3.2 Center–of–mass positions • 3.3 Distances • A laboratory with a very low seismic noise and stable temperature is necessary (possibly no variations at the gravitational signal frequency) • At first, because of its higher frequency, the one–axis gradiometer seems unfavourable when compared with torsion balances
Conclusions • On the contrary this instrument has several advantages: • 6.1 The system is excited at a specific frequency in a frequency band where the seismic noise is very low • 6.2 The CMR is high, only differential noise will matter • 6.3 A capacitive bridge is used for the detection of the signal • 6.4 The system undergoes small displacements and it is not subjected to the hysteresis of the spring • 6.5 The system can be calibrated very easily • 6.6 With the use of electric fields we are able to lower its resonance frequency • 6.7 The system works in free fall conditions, therefore it can be used in space